资源下载
资源下载






机器人夹爪
文件列表(压缩包大小 13.68M)
免费
概述
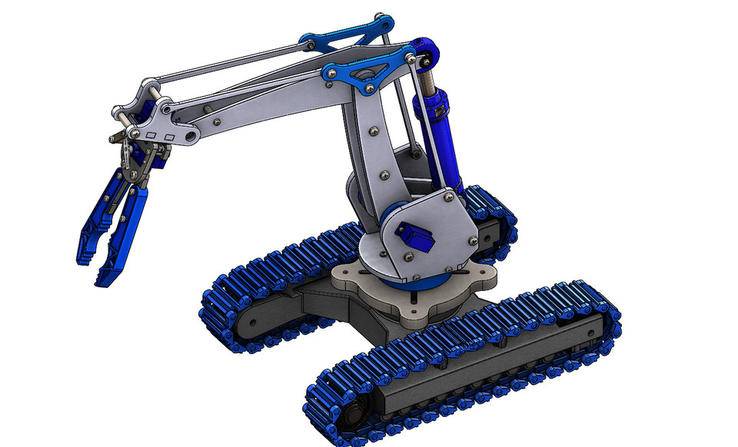
在机器人技术中,末端执行器是位于机器人手臂末端的设备,旨在与环境互动。该设备的确切性质取决于机器人的应用。
末端执行器可以由抓爪或工具组成。当提到机器人的抓握时,机器人抓爪一般分为四类:
1.撞击式:通过直接撞击物体而物理抓握的颚或爪。 2.侵入性:物理穿透对象表面的针,针或(用于纺织品,碳纤维和玻璃纤维的处理)。 3.限制性的:施加到物体表面的吸引力(无论是通过真空,磁粘附还是电粘附)。 4.连续的:需要直接接触才能发生粘合(例如胶水,表面张力或冻结)。
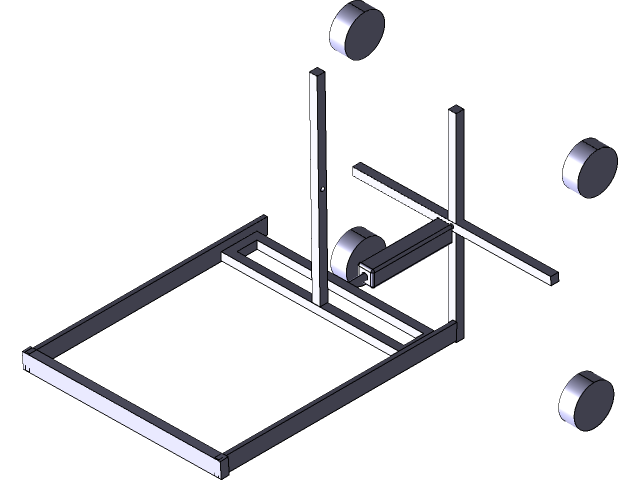
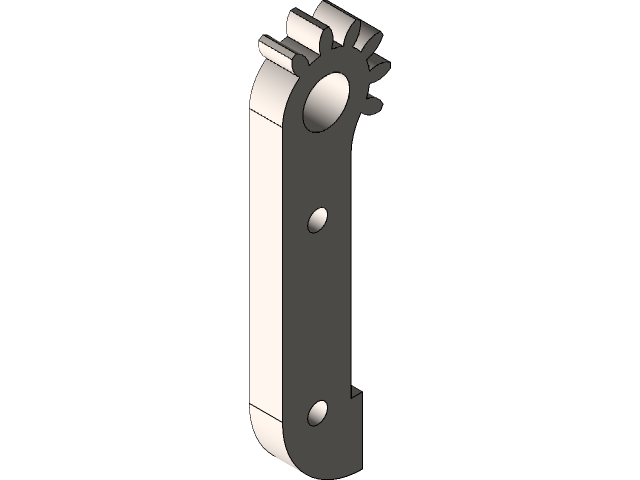
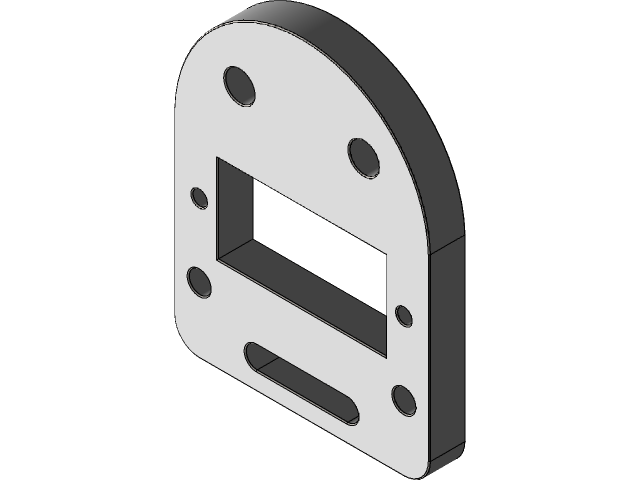
这里是在Solidworks 2016中设计的带有2个手指的冲击式抓爪。此外,这里还以简化的格式设计了两个伺服电机,以帮助以后的仿真。我也包括了所有parasolid文件(.x_t),以便SolidWorks其他版本的用户可以访问它。
有关伺服电机的详细设计,请查看我的型号目录。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250