资源下载
资源下载

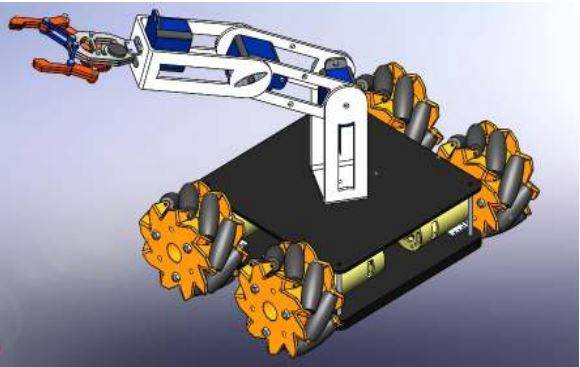
机械臂T310(6自由度)
文件列表(压缩包大小 23.02M)
免费
概述
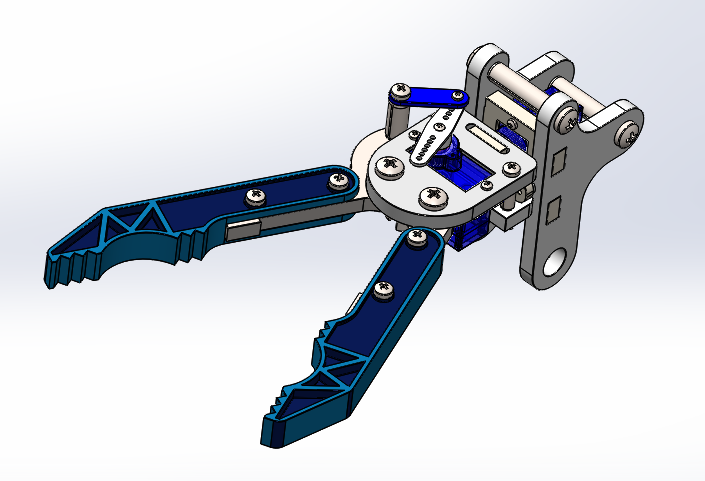
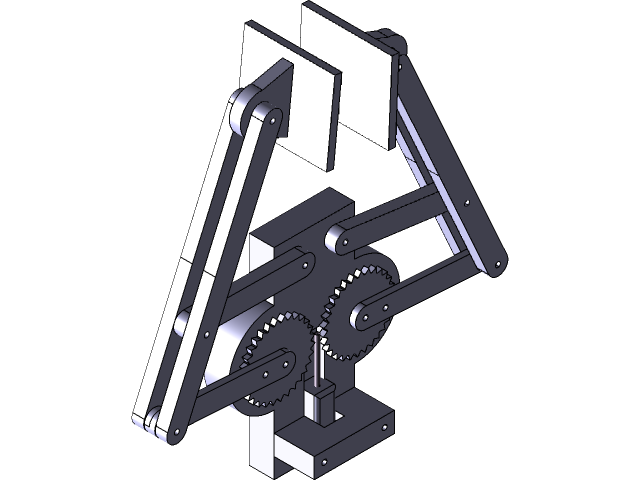
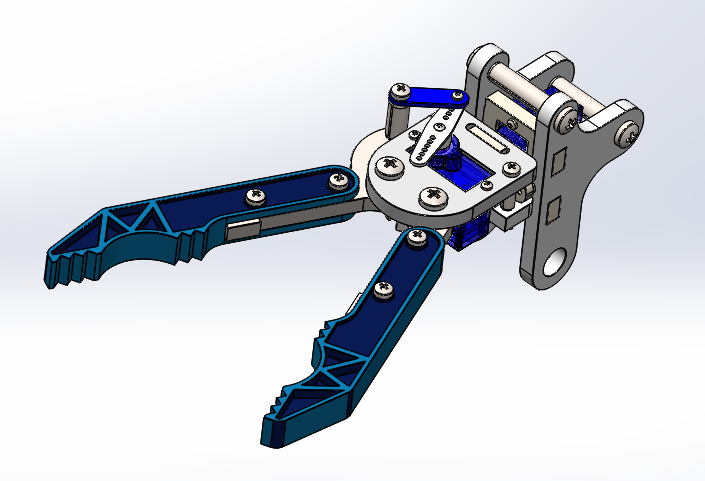
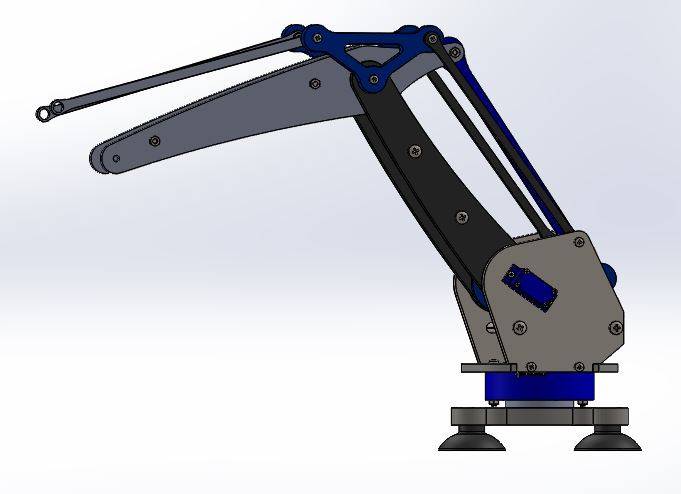
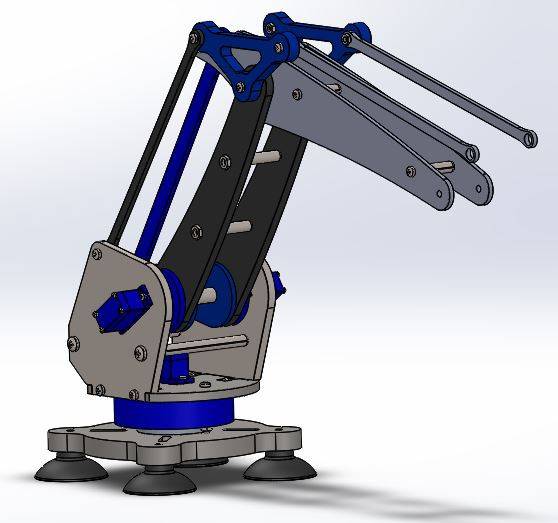
机械臂是一种机械臂,通常是可编程的,其功能与人类的臂相似。手臂可以是机械装置的总和,也可以是更复杂的机器人的一部分。这种机械手的连杆通过关节进行连接,关节既可以进行旋转运动(例如在多关节机器人中),也可以进行平移(线性)位移。机械手的链节可被视为形成运动学链。机械手运动链的末端称为末端执行器,它类似于人的手。
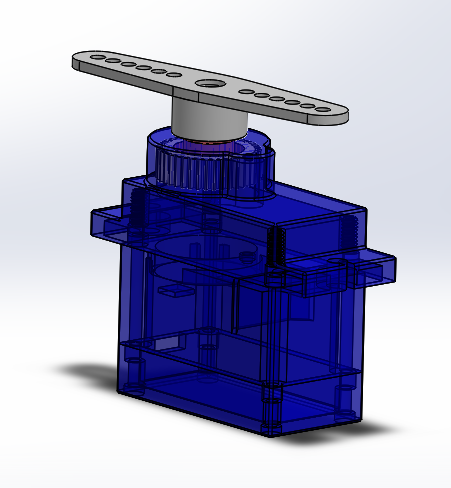
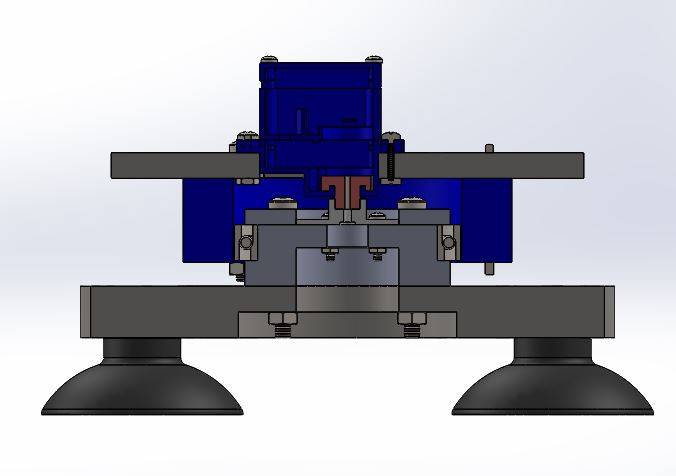
1.设计在Solidworks2016中完成。 2.包含用于抓取器和伺服的文件。 3.使用螺丝将模型完全固定。 4.可以清楚地观察到所有零件的运动。
它是在Solidworks教程的帮助下创建的。我所遇到的问题已得到修复,并进行了调整,以获得一个功能全面的模型。本教程的链接是为了您的利益而给出的。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250