资源下载
资源下载

项目“蜘蛛”机器人SP-8
文件列表(压缩包大小 2.61M)
免费
概述
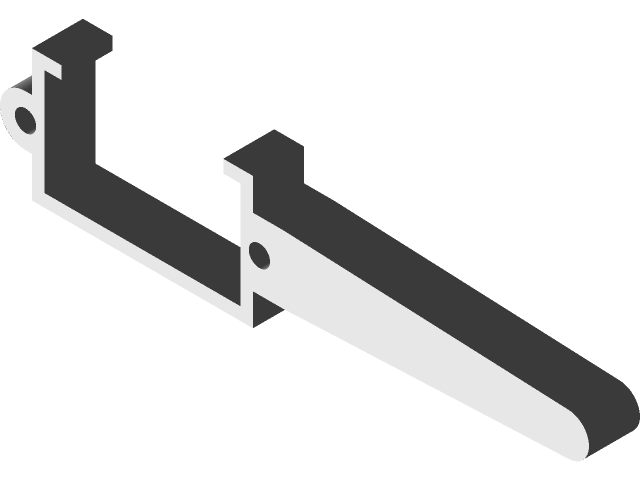
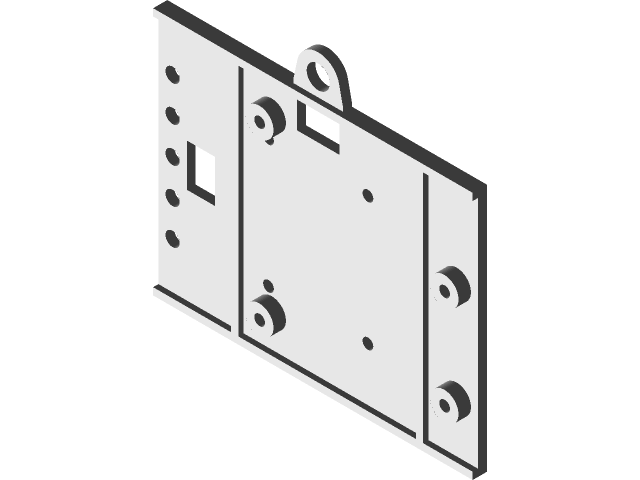
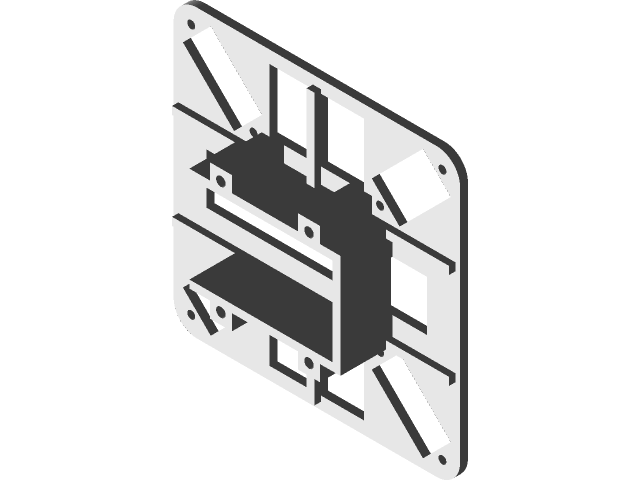
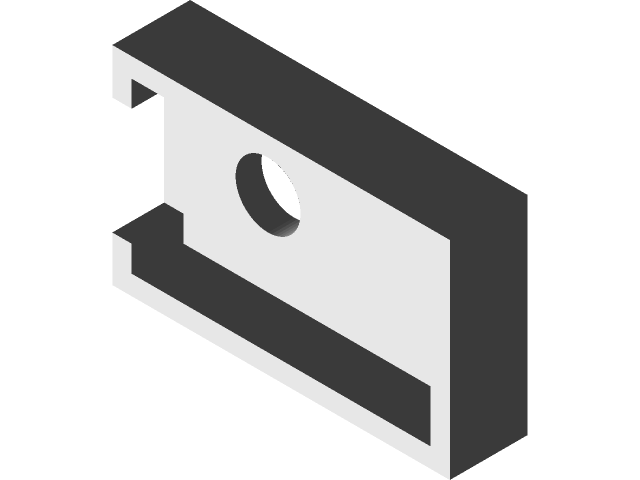
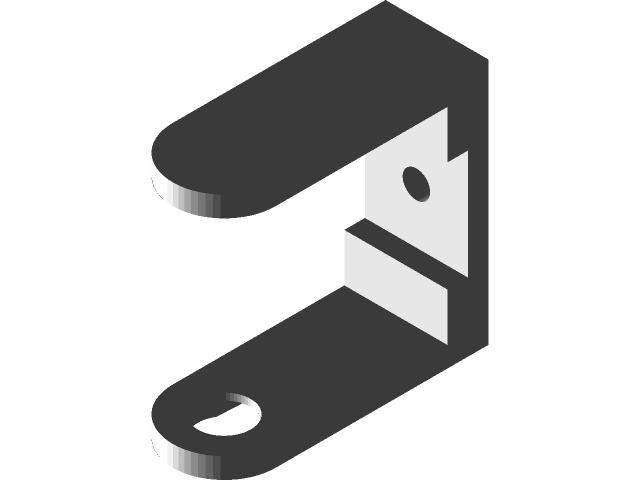
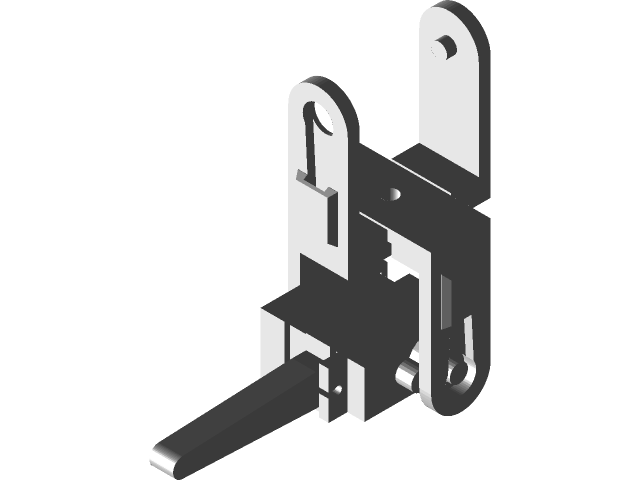
该“蜘蛛”机器人仅由5个不同的部分组成: 肢体固定板和支撑Arduino电路的上板,臂叉(每臂2个)和脚以及一个用于固定伺服器的小盒子。
通过8个伺服器确保其可移动性,使其可以向前,向后或转弯(向右或向左)。通过红外线控制进行远程控制。逻辑由Arduino UNO板管理。使用OpenSCAD软件对元素进行建模,然后在PLA的Creality CR-20 3D打印机上进行打印。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250