资源下载
资源下载
SPTL-球形联动辅助手臂并联机器人
文件列表(压缩包大小 9.00M)
免费
概述
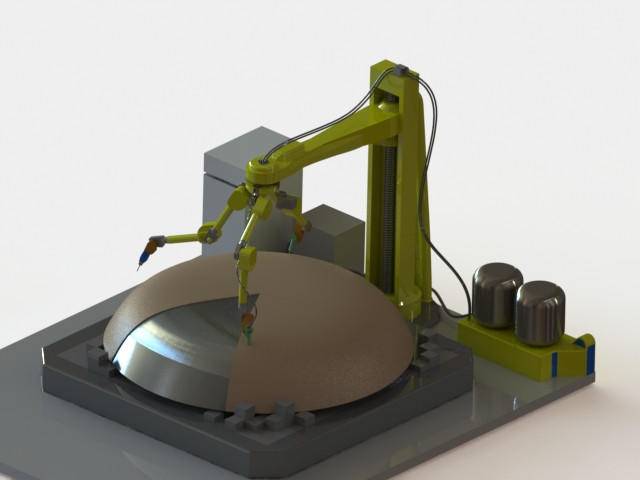
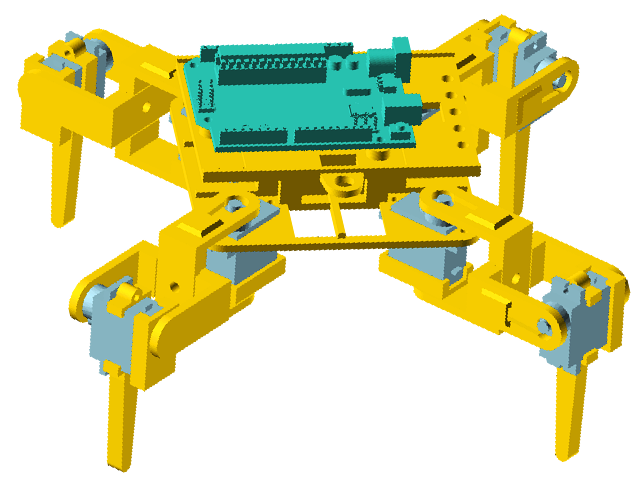
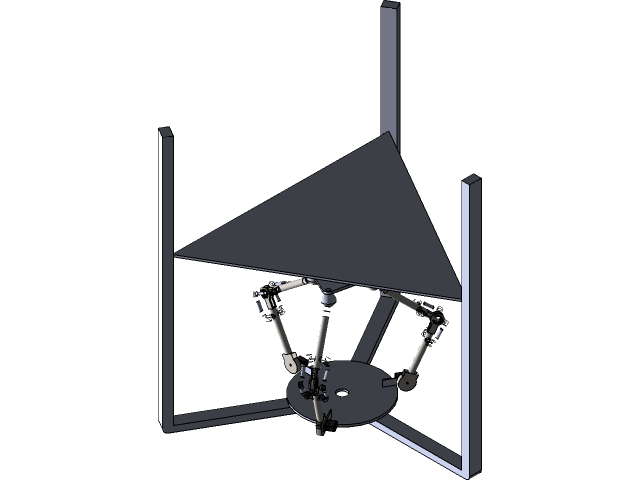
主臂没有活动关节,并且通过球形辅助连杆机构上安装的电动机进行远程驱动。整个机构由三个球形辅助旋转关节支臂组成,分别在中枢关节处,以及旋转和球形关节在第一个关节和最后一个关节处。 **注意:装配体模型视图是上下颠倒的。请考虑到这一点。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250
SPTL-球形联动辅助手臂并联机器人
文件列表(压缩包大小 9.00M)
免费
概述
主臂没有活动关节,并且通过球形辅助连杆机构上安装的电动机进行远程驱动。整个机构由三个球形辅助旋转关节支臂组成,分别在中枢关节处,以及旋转和球形关节在第一个关节和最后一个关节处。 **注意:装配体模型视图是上下颠倒的。请考虑到这一点。
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈
评论(0)