资源下载
资源下载



基于深度传感器的近距离障碍预警

文件列表(压缩包大小 5.90M)
免费
概述
研究背景
视觉是人类与外界发生联系、获取信息的重要渠道,人类从外界获得的信 息中80%左右是从视觉输入的。而盲人这一特殊群体,由于视觉的缺失,其日 常生活,特别是外出活动,受到了很大的限制。在当下,盲人群体人数众多。 世界卫生组织的统计数显示,当前全球有2.85亿人有视觉障碍,其中3,900万人 为全盲,24,600万人视力低下[1] 。目前,盲人的日常行动普遍需要人员陪护,或 者需要依靠手杖、导盲犬等传统工具的帮助。这不但限制了盲人的自主行动, 而且给他们的出行增加了成本。同时,手杖等传统工具的探测范围、获取的信 息都十分有限,无法为盲人提供充分的协助。因此,亟需一种新型的高效的视 障辅助设备,来代替这些传统的低效的设备,为盲人的出行提供方便。
英特尔RealSense等RGB-D传感器的引入为实现新型高效的视障辅助设备提 供了技术基础[2] 。虽然RGB-D传感器的设计初衷大多是作为室内体感游戏的接 口(如微软Kinect),但由于其可以获得高质量、高帧率的深度图,在计算机 视觉方面的应用迅速铺开[3] 。通过RGB-D传感器可以获取当前场景的深度信 息,利用此深度信息,经计算机处理后,可以识别出障碍物并计算最佳通路, 然后通过某种交互方式将处理后的信息传递给盲人,实现导盲的功能。这样就 解决了传统导盲方式的低效问题,为盲人出行提供了极大的便利。目前市场上 的RGB-D传感器主要有微软Kinect,Intel RealSense,以及华硕Xtion等。
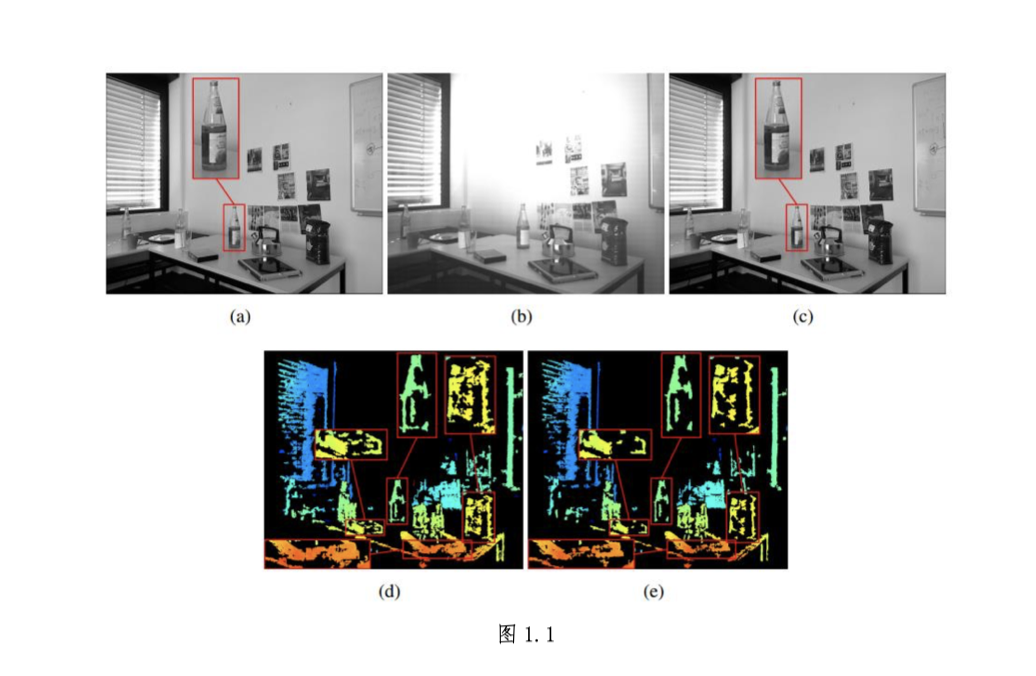
但是目前利用 RGB-D 传感器实现导盲还并非完美无缺。由于视障辅助设备 使用场景复杂多变,鲁棒性要求高;而目前的 RGB-D 传感器自身存在的探测局 限性会使其无法完全满足要求。以 RealSense R200 为例,其深度探测的最近距离 约为 0.5m 左右,小于此距离则无法探测出物体的深度信息;对含有透明表面、 镜面等物体也无法有效探测到深度;图像传感器的视场角也比较有限。这些局限 性会使得其用于视障辅助系统时,会导致某些特殊情况下障碍物无法识别,出现 误判的情况,使整个系统的可靠性和实用性下降。
通过对 RGB-D 传感器的优化,可以在一定程度上克服上述局限性,大大减 少其探测盲区,进而增强其用于视障辅助系统时的可靠性,提高视障辅助系统性 能,帮助视障人士更加全面、有效地获取当前路面情况,识别周围的障碍物并规 划行走路线,实现视障人士行走、过马路等活动的自主化,从而极大地方便视障 人士的生活。
目录

声明:本资源为本科生毕业设计,包含答辩PPT,转载自浙江大学汪凯巍教授课题组:http://wangkaiwei.org/index.html
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250