资源下载
资源下载






机器人工作场所
文件列表(压缩包大小 237.15M)
免费
概述
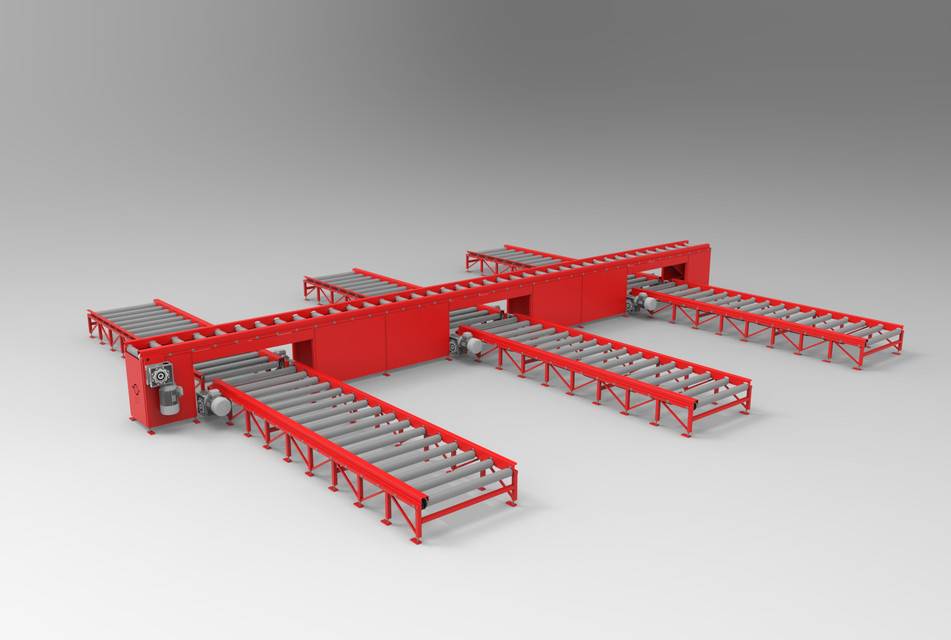
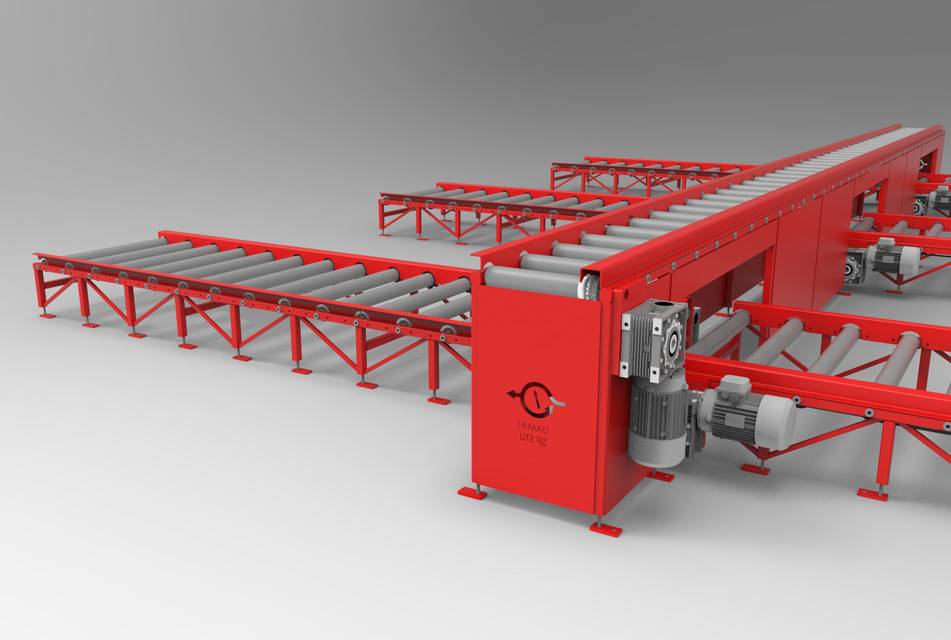
Semestral项目包括机器人,传送带,夹持器和片材产品。
我的机器人工作场所包括四个KUKA机器人。 第一个机器人(从左侧)从特殊的托盘上取下钢架,并将其放在主输送机上。然后将框架移动到第二个机器人的前面。 第二个机器人从特殊的托盘上取下弯曲的钢板,然后放置到准备好的框架上。 组件(框架+钢板)被移动到下一个机器人的前面。 第三机器人焊接组件在一起。 焊接组件移至最后一个机器人,然后移至europallet。重复此过程。 除了3D模型外,我还在Siemens Tecnomatix的这个工作场所中进行了仿真。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250