 资源下载
资源下载
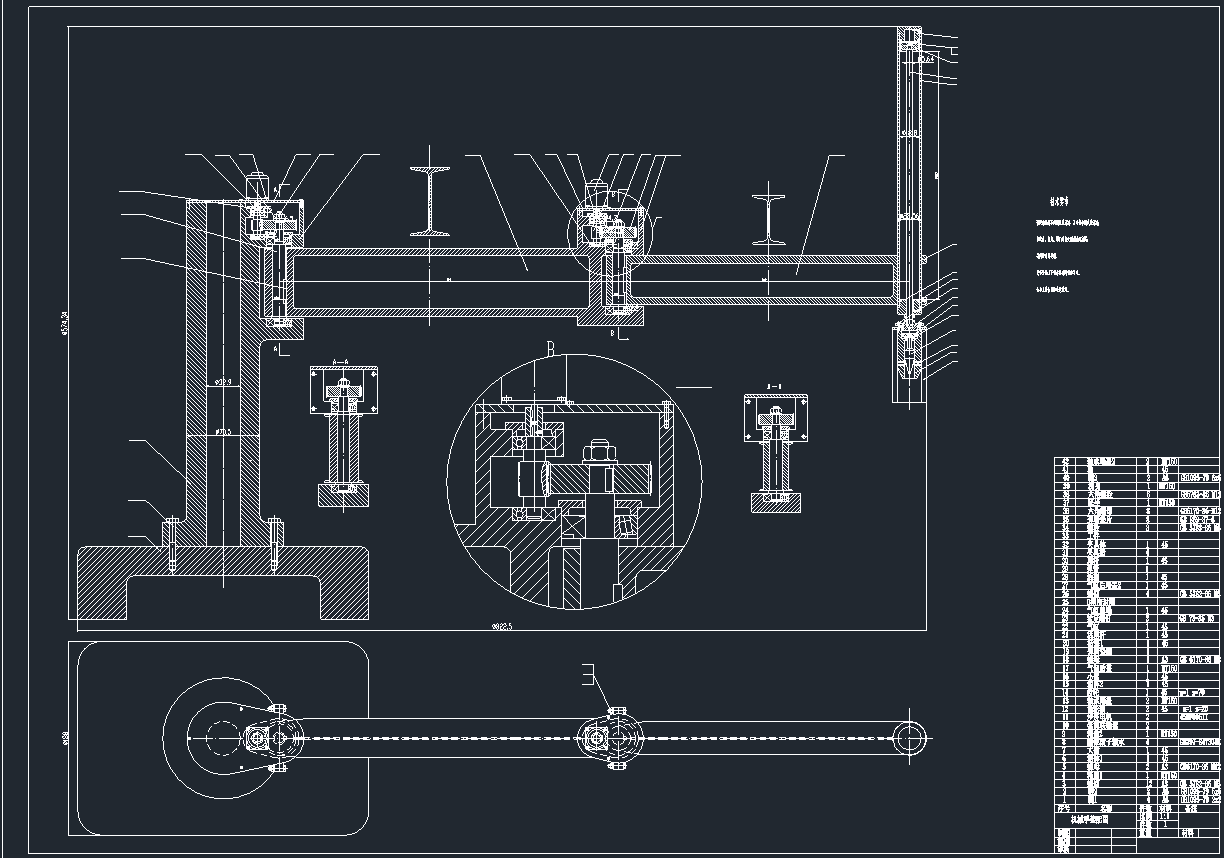


【毕业设计】电动式关节型机器人机械手的结构设计与仿真

文件列表(压缩包大小 1.21M)
免费
概述
论文摘要
本文简要介绍了电动式关节型机器人机械手的概念,机械手硬件和软件的组成,机械手各个部件的整体尺寸设计,气动技术的特点。
本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。
同时,设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。
设计了机械手的手臂结构。设计出了机械手的气动系统,绘制了机械手气压系统工作原理图,大大提高了绘图效率和图纸质量,画出了机械手的装配图。
本资源包含任务书、毕业设计论文与设计图纸。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(1)

0/250
下载后的评价
赞
2023-06-30
回复







