资源下载
资源下载

1. 国外厂商
1 ) 德尔福以典型的 zFAS 为例(如下图所示 ), 这款基于德尔福提供的域控制器设计的产品,内部集成了 NVIDIA TegraK1 处理器、 Mobileye 的 EyeQ3 芯片以及 Altera 的Cyclone5 FPGA 芯片,各个部分分别处理不同的模块。 Tegra K1 用于 4 路环视图像处理, Cy clone5FPGA 负责障碍物识别、地图融合及各种传感器的预处理工作, EyeQ3 负责前向识别处理。

2 ) 麦格纳 2017 年 8 月底,麦格纳在德国首次公布了最新研发的 MAX4 自动驾驶平台。 整个解决方案融合了摄像头、高清雷达、激光雷达和超声波雷达等在内的传感器系统,以及域控制器处理系统、软件系统。 作为一个高度集成的自动驾驶传感器和计算平台, MAX4 具有定制化和高扩展性 的 特 点,可 实 现 L4 级别的自动驾驶,同时适用于城市道路和高速公路路况。
3 ) 采埃孚
采埃孚的 ProAI 域控制器会对图像及雷达数据进行处理,该控制器具有 8 核 CPU 架构的 Xavier 芯片,拥有 70 亿个晶体管以及相应的数据处理能力。采埃孚 ProAI 域控制器如下图所示。

该处理芯片每秒可管理高达 30 万亿次操作( TOPS ), 且功耗仅为 30W 。凭借其开放的架构,采埃孚 ProAI 具有高扩展性— ——硬件部件、 互联化的传感器、评估软件和功能模块可 以根据所需的用途和自动驾驶等级进行调整。
4 ) 大陆集团
大陆集团也推出了类似的域控制器— ——辅助及自动驾驶控制单元 ADCU ,如下图所示。
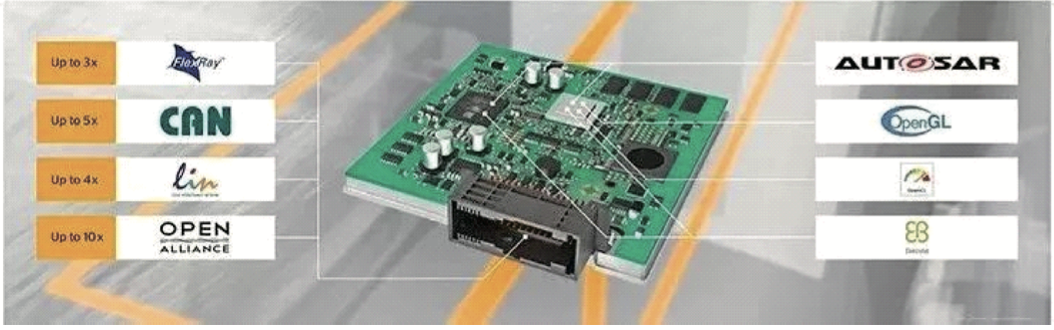
ADCU 提供了一个多用途的处理计算平台,非常适合实现高度自动驾驶( HAD )中的各种应用。
通过集成精选的硬件和软件, ADCU 可以实时监控车辆运动轨迹并规划路径。 而且, ACU 还可以执行基于车载环境传感器和其他信号输入的环境模型,涵盖了从路径规划算法到决定最佳路径(从安全、便利、环保的角度)最后到协调多执行器(如制动、悬架控制等) , 协同工作等。 其接口涵盖底盘、动力总成、驾驶辅助和多种通信方式( FlexRa y 、 LIN 等) 并且支持 AUTOSAR 架构。 这是一个模块化分级式处理平台,支持中央域模式的车辆拓扑 结构。主机厂可以针对环境识别或驾驶功能进行模块化选择和部署,扩展软件还可以根据每台车不同的基础设施和计算功能进行优化调配。
5 ) 伟世通
伟世通推出的自动驾驶域控制器— —— DriveCore 是一款专门针对自动驾驶研发的、安 全可靠的域控制器。 该平台的亮点在于灵活、模块化、可定制。 DriveCore 可以整合一系列来自不同厂家的软、硬件平台,如摄像头、激光雷达等传感器的数据,支持全数字仪表、先进车载显示屏技术、驾驶员监测、抬头显示,以及伟世通的软件 开发工具,以满足不同自动 驾驶技术研发的需求,特别是 L3 及 L3+ 级别的自动驾驶技术的开发。 DriveCore 与伟世通此前推出的座舱域控 制器 SmartCore 类似。 DriveCore 支 持 汽 车 制 造 商 自 由 选 择 不 同 的硬件与软件、算法等,快速开发出自动驾驶解决方案及产品,加快新技术或产品的上市 速度。
2. 国内厂商
1 ) 东软睿驰
面向 L3 和 L4 级别的高级别自动驾驶技术,东软睿驰推出了基于 NXP 自动驾驶芯片 S V 的自动驾驶中央域控制器,可以满足当前整车厂对于自动驾驶的需求。 在硬件方面,该控制器的安全性较高,可支持多路高清摄像头、多路激光雷达、毫米波雷达、超声波雷达的 同时接入。 在软件方面,该控制器定制性较强,便于整车厂后期的个性化定制开发。 该控制 器套件不仅提供基础软件,还提供了环境感知、传感器融合、决策控制套件;并提供传感器 接口,支持第三方嵌入自己的应用,可实现典型场景下的 自 动 驾 驶。 该 控 制 器 支 持 前 方 160m 车辆检测, 100m 行人、摩托车、自行车检测及车道线检测,移动障碍物检测,能够识别 美国、欧洲、日本、中国等多个国家和地区的限速标识。
2 ) 新悦智行
新悦智行开发的一款基于 NVIDIA GPU 自 主 设 计 开 发 的 低 成 本 WiseADCU , 对 标 NVIDIA DrivePX2 , 集成 12 路 GSML 视频输入接口、 12 路 CAN-FD 通信接口、 2 路 AVB车载以太 网 通 信 接 口, 2+2 路 USB 2.0 / 3.0 , 搭 载 2 颗 Te g ra ParkerSoC 、 2 颗 Pascal GPU 、 2 颗 Cortex-R5 MCU 。 除了与整车接口外,还可以实现与 HD 摄像头、激光雷达、毫米波雷达、 RTK / IMU 定位系统、 LTE 通信模块的无缝对接。 3 ) 武汉环宇智行武汉环宇智行开发的名为 TITAN-Ⅲ 的自动驾驶车辆控制器,是基于 NVIDIA 公司的 J on TX2 设计 的,运 行 Ubuntu 操 作 系 统。 支 持 FPDLINK Ⅲ 接 口 摄 像 头 接 入,支 持USB 、 CAN 、 RS-485 / 232 、 Ethernet 、 I / O 等多种硬件接口接入,支持 SATA 硬盘存储,内置4G通信模块、高精度定位模块、 V2X 模块。 计算性能和端口配置基本满足现阶段车辆自动 驾驶的传感器接入、感知融合、规划决策等功能需要。 具有体积小、功耗低、易部署等特点。 TITAN-Ⅲ 支持同时接入 12 个摄像头、 6 个激光雷达和 5 个毫米波雷达的计算量,整机功耗在 60W 左右。 对比之前用工控机达到以上同样实时计算量的方案:至少需要 3~4 个 i7 级 别的工控机,并且工控机之间需要用千兆交换机连接,整套设备会把车辆的后备箱塞满,且 计算功耗高于 1500W 。
本回答的主要内容来自图书《自动驾驶汽车平台技术基础》,清华大学出版社