 资源下载
资源下载




H-845六足/机器人斯图尔特平台
文件列表(压缩包大小 7.91M)
免费
概述
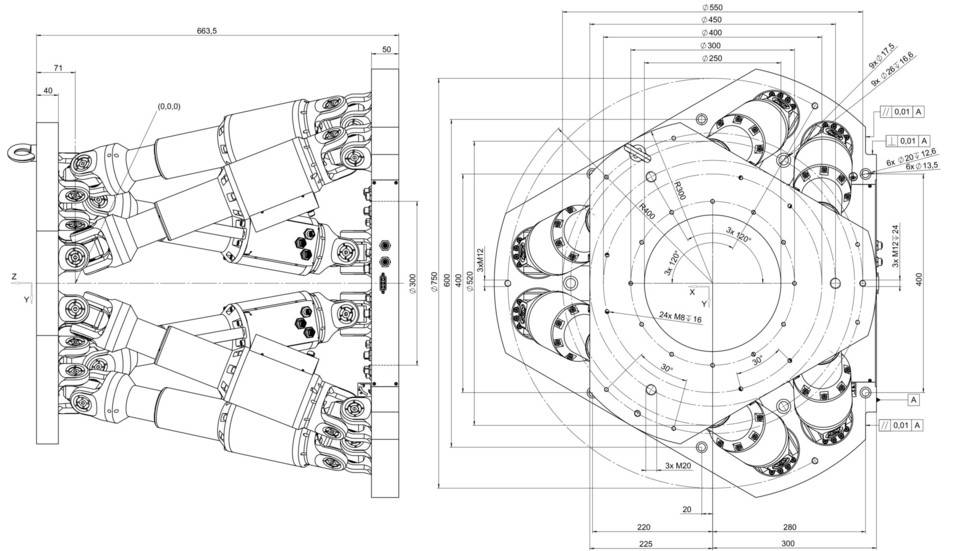
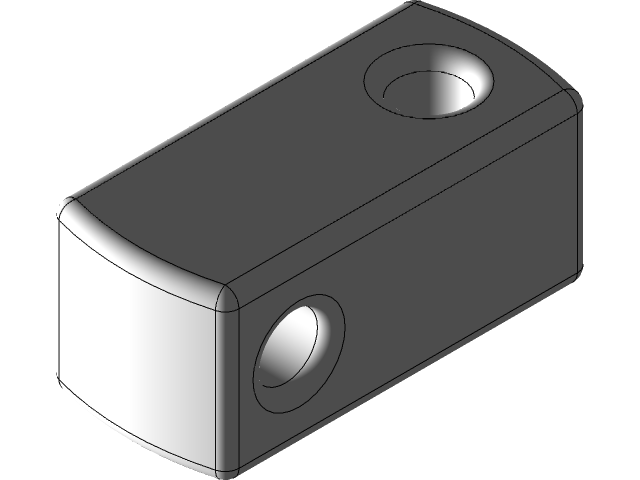
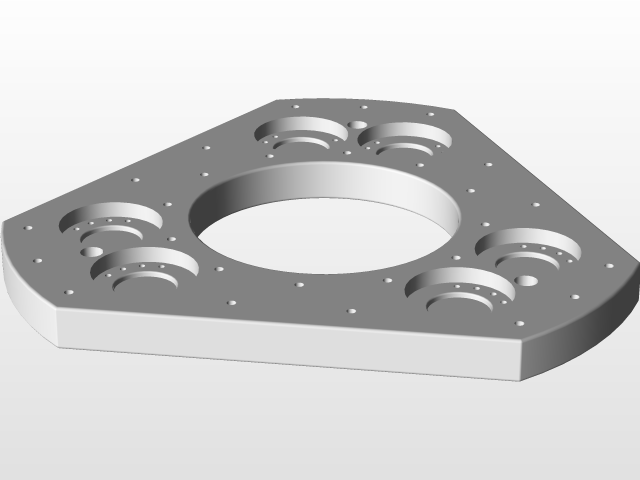
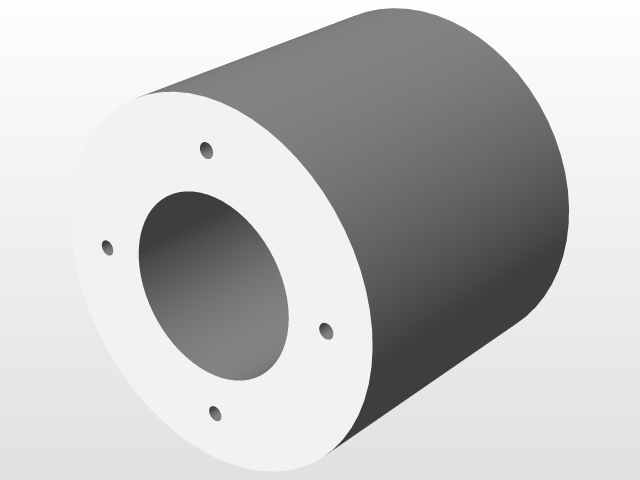
这是从PI-Solution建模的H-845六脚架系统,用于精确的运动和定位。 大部分零件是根据链接中给定的系统尺寸建模的:
此设计的主要目的是为了个人学习和模拟目的。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(2)

0/250
下载后的评价
赞
2022-06-17
回复
下载后的评价
感恩分享!
2022-08-10
回复






