 资源下载
资源下载

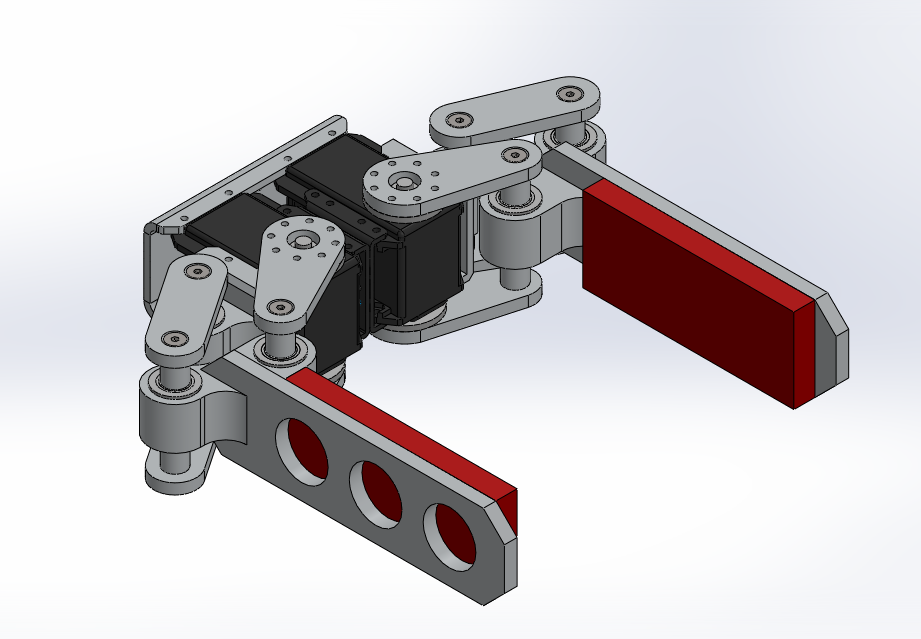
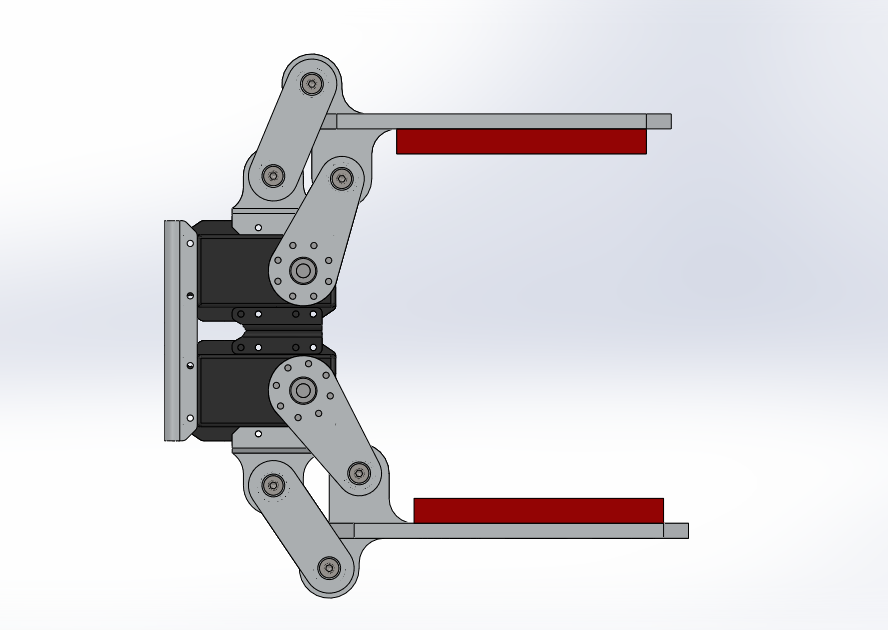

4杆联动夹爪(与Dynamixel RX-64配合使用)
文件列表(压缩包大小 13.61M)
免费
概述
该2 DOF抓爪利用两对4连杆机构,由两个Dynamixel RX-64伺服驱动器(由Robotis驱动)驱动,以实现精确抓持。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(3)

0/250
下载后的评价
赞
2023-06-06
回复
下载后的评价
赞
2023-06-30
回复
下载后的评价
感恩分享!
2023-08-27
回复






