资源下载
资源下载
基于Arduino的汽车机器人模块

文件列表(压缩包大小 125.10K)
免费
概述
需要的元件
Arduino UNO

SparkFun按钮开关12mm

杜邦线

面包板
LED

电阻330Ω

Arduino IDE

原理及流程
介绍
在这个项目中,你将学习如何构建自己的PCB Car Arduino模块,以了解机器人的控制。通过本模块,你将学习如何打开电动机电源以控制机器人的转轮,照明以及控制机器人的导航方向。
Arduino汽车模块项目
机器人技术中最大的困难之一就是学习控制机器人。因此,使用的第一批机器人之一是两轮机器人。这些机器人使用两个引擎来控制机器人在整个环境中的导航方向。
在开始时,许多用户在控制电动机方面都遇到了很大的困难,因为在学习开始时,电路很复杂。
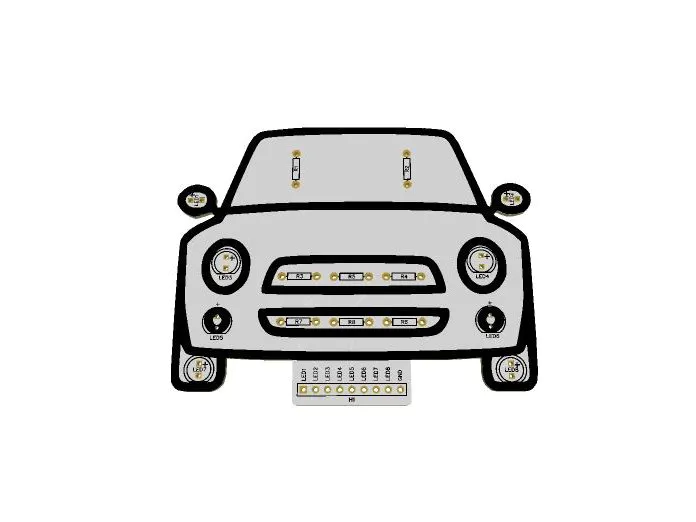
因此,一种方法是使用Robot Car Arduino模块。在图1中,我们展示了Robot Car Arduino Module 。

图1-机器人汽车Arduino模块的PCB。
在项目中可以看到,用户可以控制汽车的多个部分。用户可以通过后视中的LED来控制LED ,以向汽车发出信号。
此外,用户可以使用后视LED来照亮通孔并打开汽车大灯的LED。每个车轮上都有一个LED。通过导线,用户可以控制车辆的方向,换句话说,用户可以打开电动机电源,使汽车直行,向左,向右或向后。
为了让你了解PCB的连接,你可以看到图2所示的PCB的电子原理图。
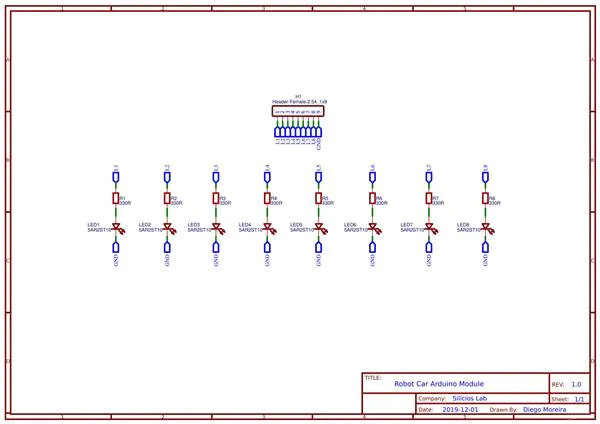
图2-机器人车Arduino模块的电子原理图
可以看到,有8个LED和一个GND引脚用于连接并打开Arduino机器人汽车模块中的每个LED的电源。
因此,为了帮助你创建一个好的项目,你可以下载代码并通过Arduino控制自己的汽车。
void setup()
{
// put your setup code here, to run once:
//Config the pin 2 until pin 9 as OUTPUT
for(byte pin = 2; pin < 10; pin++)
{
pinMode(pin, OUTPUT);
}
}
void loop()
{
// put your main code here, to run repeatedly:
digitalWrite(2, HIGH); //Signal light ON left
delay(1000);
digitalWrite(2, LOW); //Signal light OFF left
digitalWrite(3, HIGH); //Signal light ON right
delay(1000);
digitalWrite(2, LOW); //Signal light OFF right
digitalWrite(4, HIGH); //Turn ON Left Headlight LED
digitalWrite(5, HIGH); //Turn ON Right Headlight LED
digitalWrite(6, HIGH); //Turn ON Left Brake LED
digitalWrite(7, HIGH); //Turn ON Right Brake LED
digitalWrite(8, HIGH); //TURN ON Left Wheel Motor
digitalWrite(9, HIGH); //Turn ON Right Wheel Motor
delay(1500);
digitalWrite(4, LOW); //Turn OFF Left Headlight LED
digitalWrite(5, LOW); //Turn OFF Right Headlight LED
digitalWrite(6, LOW); //Turn OFF Left Brake LED
digitalWrite(7, LOW); //Turn OFF Right Brake LED
digitalWrite(8, LOW); //Turn OFF Left Wheel Motor
digitalWrite(9, LOW); //Turn OFF Right Wheel Motor
}
本代码可用于测试机器人汽车的每个LED并发挥其功能。
结论
因此,通过这个PCB Arduino模块,你可以通过一个简单的模块来教机器人,并使学生更容易学习编程和机器人控制的原理。gerber文件下载区已给出。
最后
所有需要的文件在下载区均可找到。
via:https://www.hackster.io/312676/car-robot-arduino-module-1dd736
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250