资源下载
资源下载




PETOI Bittle Evo四足机器人转速工程
文件列表(压缩包大小 14.75M)
免费
概述
原始PETOI Bittle的更多详细信息:https://www.petoi.com/
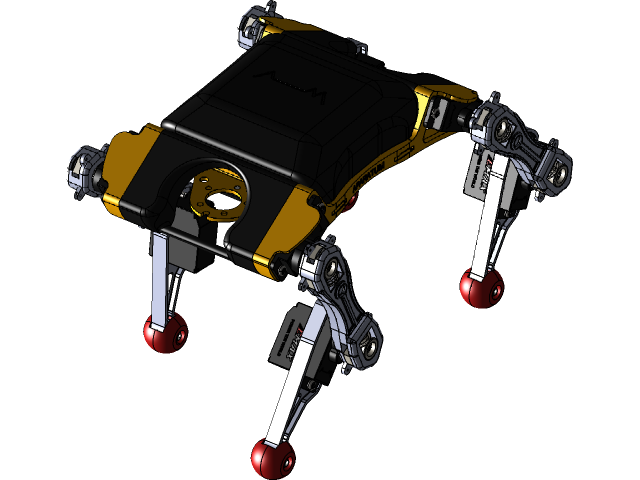
PETOI Bittle是一只手掌大小的机器狗(NyBoard和软件确实功能强大且高效)。 该模型只是我自己进行的逆向工程研究,PETOI公司完全没有提供,因此对任何“不一致设计”概不负责。
我仍然不自以为是,但过去几年我设计了一些四足机器人,并研究了履带式步态。
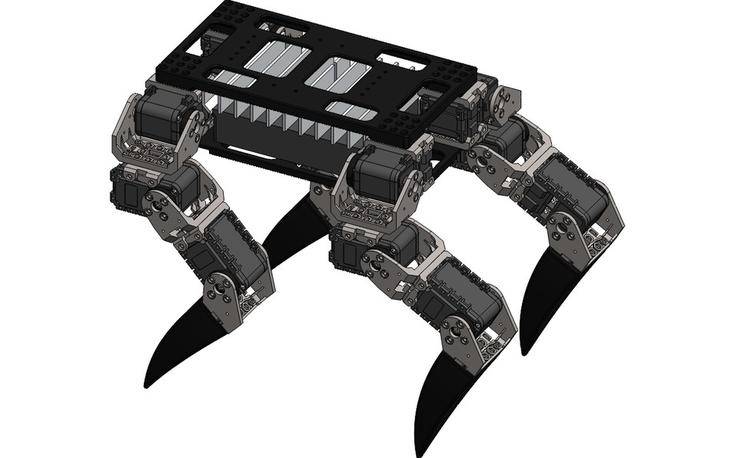
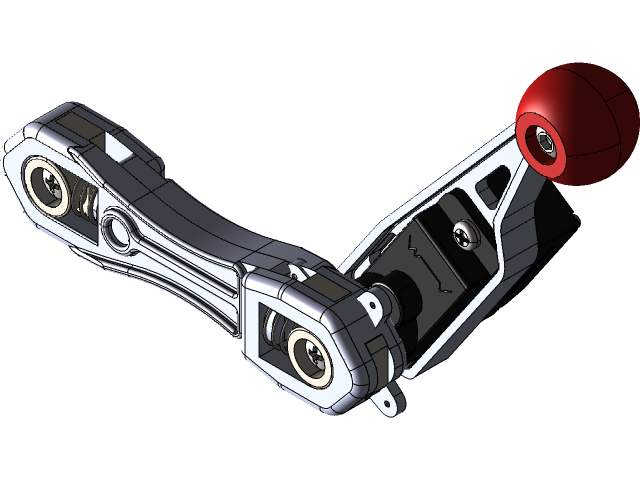
这是我本周完成的Bittle逆向工程模型的渲染图(基于PETOI图片,视频以及我可以掌握的有关他的出色机器人的所有信息)
该模型非常完整和准确。它由我自己的原型板提供动力,并使用EMAX 12g sevos。
这不是我正在研究的“易于打印”版本,而是对PETOI工作的真实研究。
我还将提供扩展版本:功能强大,更大的3DOF支腿...在接下来的几周中。代号PHOEBE。
以我的观点,PETOI应该开发一个“ PRO”版本,并把这项惊人的工作表现得更像一个功能强大,具有研究性和教育性的履带(而不是玩具)。
希望你会喜欢。
感谢PETOI团队和李荣忠带来的如此棒的东西。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250