资源下载
资源下载






四足机器人
文件列表(压缩包大小 59.05M)
免费
概述
编辑替换了装配步骤文件,因为我在打开原始文件时注意到它会尝试创建所有单个零件文件。
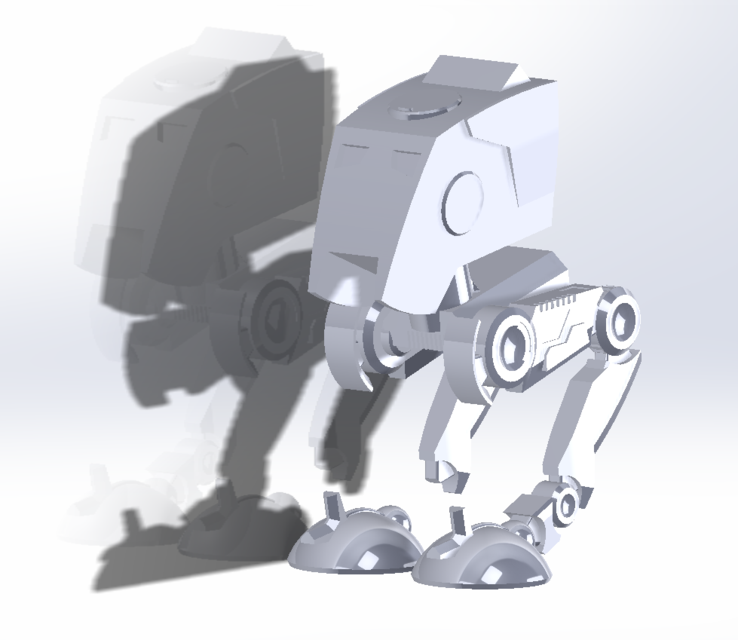
这是我在看完Boston Dynamics的Spot Mini机器人后设计和制造的机器人。
支腿本来是对称的形状(像蜘蛛一样),但是在尝试爬网时证明是不稳定的。
我目前正在研究一种新版本,以取代该版本,该版本将使用带编码器的齿轮电动机,而不是Dynamixel伺服器。
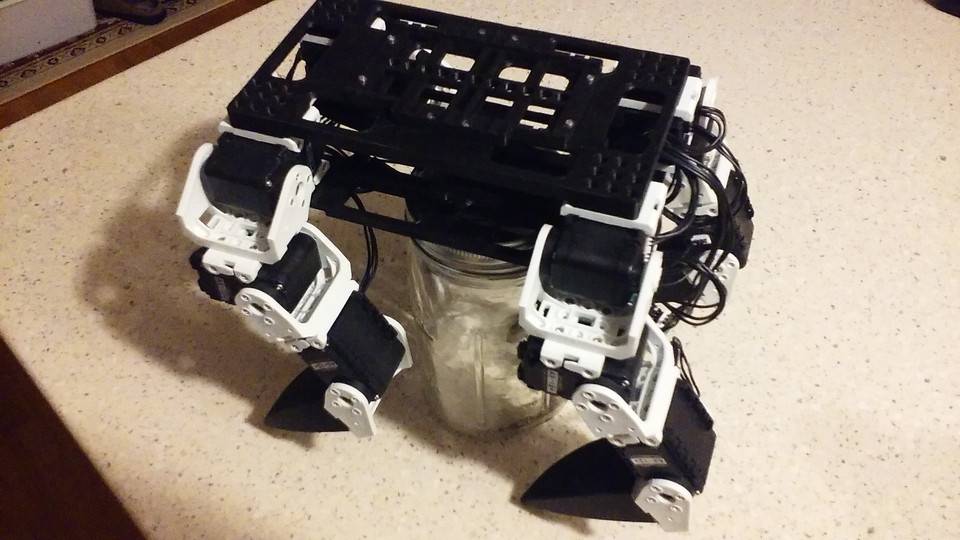
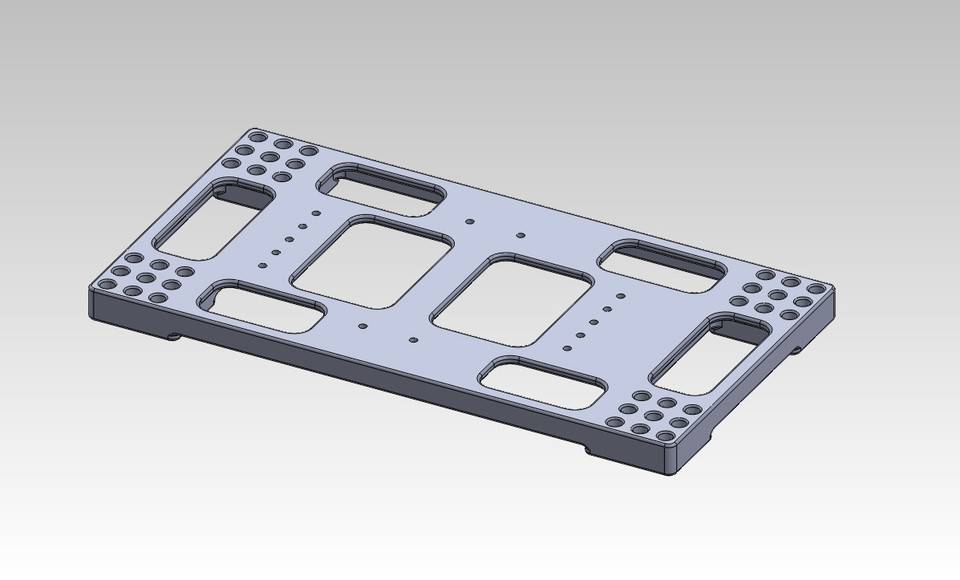
如果有人有兴趣,可以设置机器人的车身面板和支脚进行3D打印。
此外,我还要感谢Robotis提供了可供下载的STEP模型。它们是FP04-F(1至3)型。 AX-12文件是从GrabCAD下载的,但是不幸的是,该模型似乎已经不存在,上载该文件的个人也不再存在。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250