资源下载
资源下载




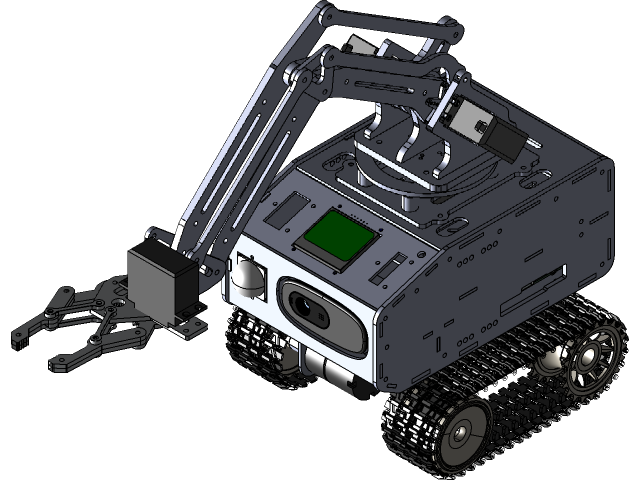

Explorer-1对象运输机器人手臂3DOF |罗孚机器人搬运物品
文件列表(压缩包大小 63.14M)
免费
概述
该机器人的灵感来自Spot Mini(带手臂)-Boston Dynamics,但体积较小,仍然使用连续的履带轮
尺寸
- P x L x T:
- 重量:
材料 1.丙烯酸5毫米 2.丙烯酸3毫米 3.丙烯酸2毫米
传感器 1.超声波HC05 2. SharpGP 3。
界面 1。 2。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(1)

0/250
下载后的评价
感恩分享!
2022-12-26
回复