资源下载
资源下载
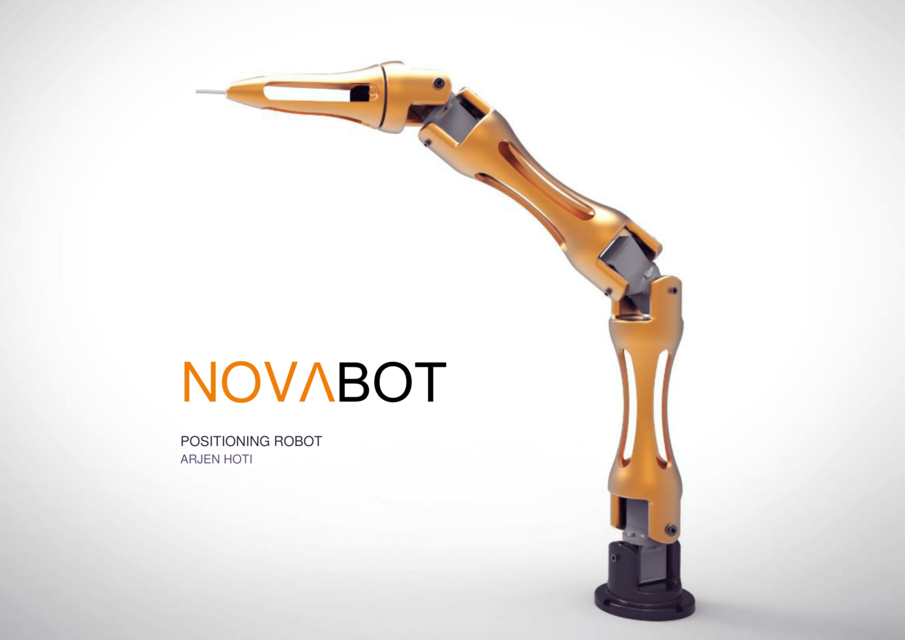




NovaBot-工业机器人设计概念
文件列表(压缩包大小 19.78M)
免费
概述
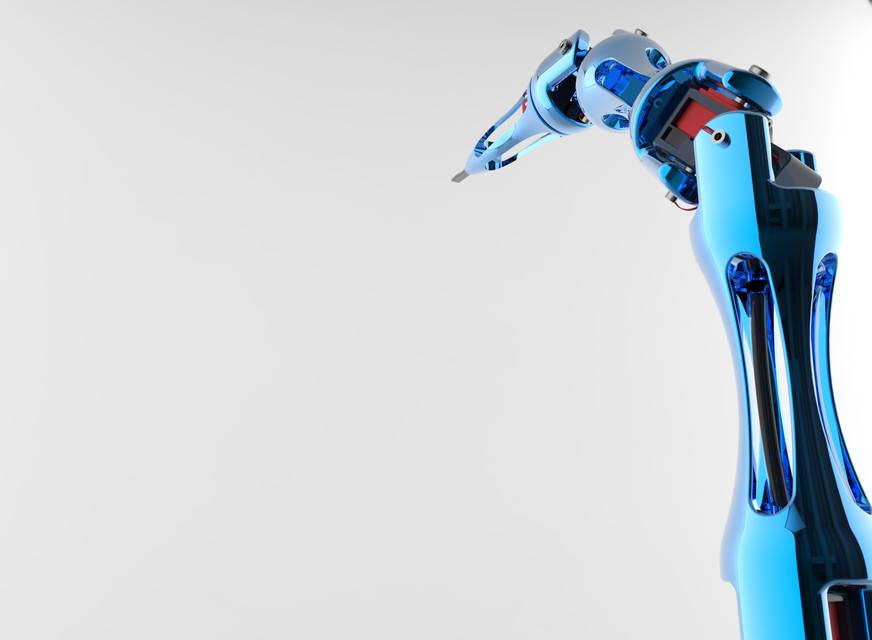
NovaBOT
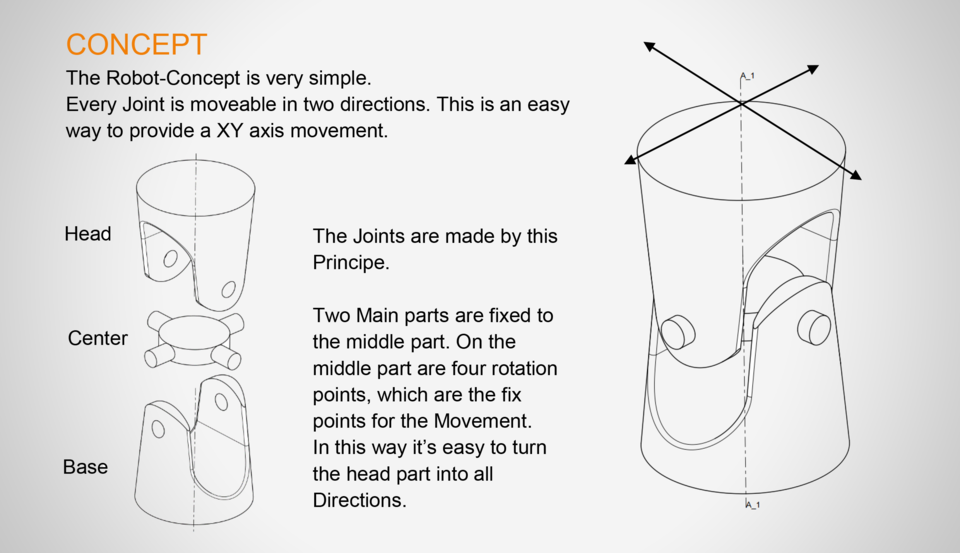
机器人概念非常简单。每个关节均可在两个方向上移动。这是提供XY轴运动的简单方法。
两个主要部分始终固定在中间部分。中间是四个旋转点,它们是机芯的固定点。这样,很容易将头部变成所有方向。
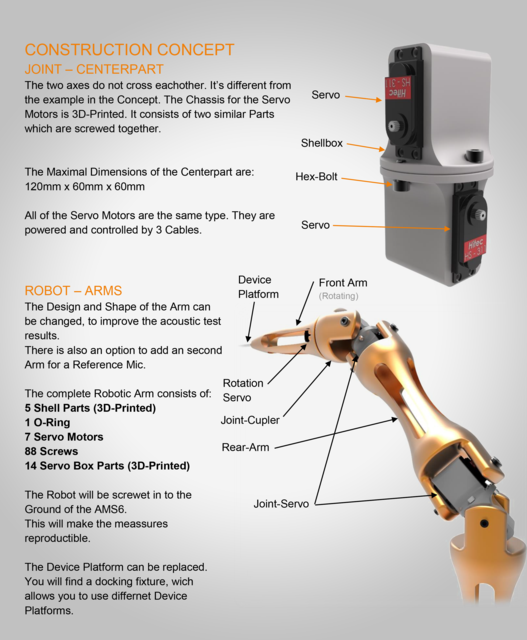
重要的: 模型和图片中使用的伺服电机不够坚固。如果您打算制造机器人,请计算所需的力量。
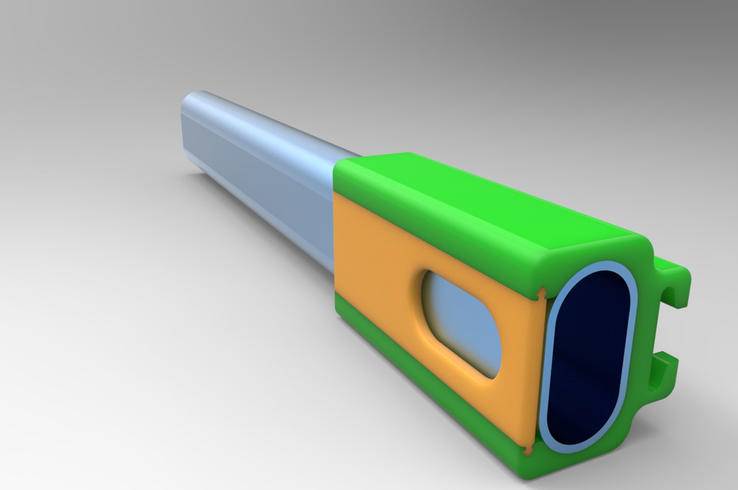
联合– CENTERPART 这两个轴彼此不交叉。与概念中的示例不同。伺服电机的底盘是3D打印的。它由两个拧在一起的类似零件组成。 中心部分的最大尺寸为:120mm x 60mm x 60mm 所有的伺服电动机都是相同的类型。它们由3根电缆供电和控制。
机器人武器 完整的机械臂包括: 5个外壳零件(3D打印) 1个O形圈 7台伺服电机 88颗螺丝 14个伺服盒零件(3D打印)。
机器人将被拧入地面。 这将使这些措施具有可重复性。 设备平台可以更换。您会发现一个对接治具,它允许您使用differentnet设备平台。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250