 资源下载
资源下载


NASA冠军夹(灰色)
文件列表(压缩包大小 36.82M)
免费
概述
** 2015年2月15日
我正在考虑此设计目前已完成,我已经上传了所有文件。
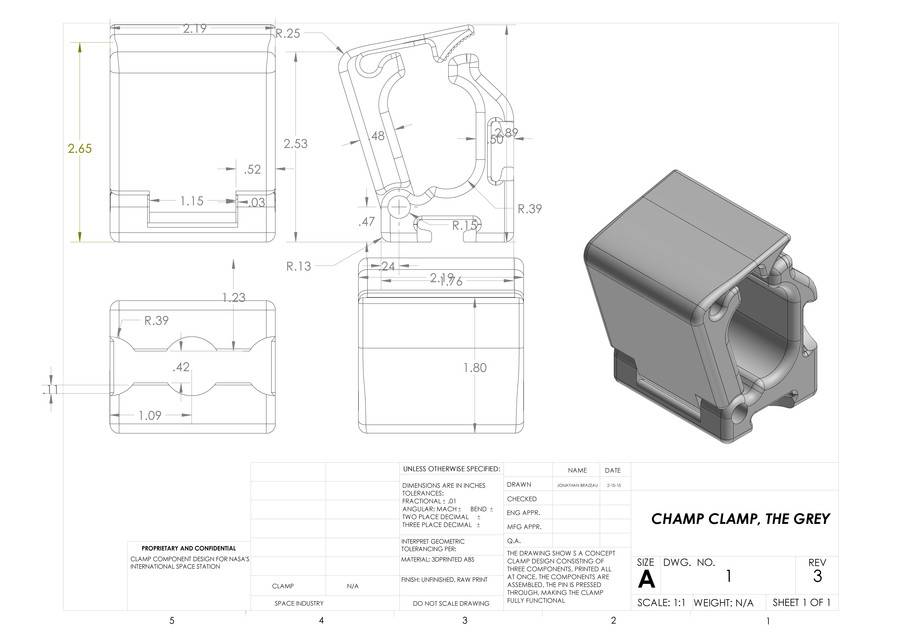
总而言之,这种夹具设计的目的是通过简单的夹具实现简单,坚固和坚固的功能,并通过螺钉或杠杆等其他方式施加额外的扭矩。我还想利用一个事实,即可以在3DP流程中使用填充,以降低整体重量,但仍具有下降的结构完整性。是的,这是一个健壮的设计,但这并不意味着它很重,只有68克。
至于美学,我知道夹具的最终用途是用于航天工业,所以我想保持表面简洁整洁,没有徽标和不必要的积聚灰尘和细菌的口袋。另外,也不需要装袋,因为您可以通过填充3DP来调整重量。我打印和测试的所有模型仅使用了30%的填充量!可以漂浮在水上,但保持在90磅以上!
我尊重圆角边缘上的规则,并尝试将它们尽可能紧密地应用于此特定模型。
无论如何,我觉得我通过这种设计成功地实现了这一目标,并且我在过程中学到了很多东西,例如由于3DP工艺中较薄的层粘结,如何使3DP零件定向以获得最大的强度。
我使用垂直于导轨的90磅静态砝码对夹具进行了测试,没有出现故障,我估计可以将其增加到100磅以上。我测试了35lbs的静态重量沿扶手运行,然后座椅轨道螺栓滑出,并将夹具固定到位。这些特定负载测试实验的视频发布在下面2-13-15。
要打印的主要文件是:
CHAMP_TheGrey_3DPR_Withpin.STL
该文件已针对使用slic3r / Pronterface软件进行的打印进行了优化,并且包含制作夹具所需的一切,并且全部打印在一张纸上。它已被修复并重新缩放。每台机器都不同,有时需要重置秤。如果是这样,只需将英寸换算为毫米,反之亦然。我已经附上了我在图库中使用的打印设置的列表。所有其他文件格式均已附加,可以修改,并可以从中创建新的STL文件。
*铰链的销钉可以单独打印,如果需要,可以在销钉上使用较高的填充量。
我要感谢NASA,GrabCad和社区给我借口在我的新3D打印机上浪费一些塑料! :P
这里有很多很棒的设计,祝大家好运,别忘了在旅途中始终享受安全眼镜的乐趣!
从2015年1月23日到现在,请查看以下我的研究进展。它将为您提供所有迭代和故障排除的精髓,这是我完成最终设计所必须经历的。
所有打印都使用Lulzbot Taz4和Lulzbot mini 3d打印机完成。
干杯!
** 2015年2月13日
我在Lulzbot mini借贷打印机上重新打印了扶手,这样扶手就可以滑入一些吧台中了。我创建了一个更好的夹具来将扶手固定在适当的位置,以便可以在夹具上进行一些静态重量测试。
综上所述,我成功地获得了90磅的重量,可以成功地悬挂在座椅滑轨螺柱上。请注意,此时夹具显示出压力和疲劳的迹象,但仍在保持。实际上,看起来座椅轨道区域可能仍会承受更大的重量,并且夹紧装置可能会在此之前失效,这令人惊讶,我认为这将是一个薄弱环节。
还应注意,此打印仅填充了30%!!!实际上,夹具上的重量使我震惊不已,但我没有失败,我预测仅20到30磅重的夹具就会失效,但它保持良好状态。我只是想强调一下,90磅重很重,您可以在视频末尾看到铲斗中的所有重量,我几乎不能举起铲斗,并且所有重量都由夹具支撑,而我尚未进行测试具有更大的权重,以查看断裂点在哪里。尝试这个真的很有趣。
以下视频显示了现场测试,这是我没有重量的第一个视频,最大重量为78磅。
此快速视频仅显示了可支撑90磅的夹具。照原样,它可能会被推高至100ish,但可能需要修改才能容纳更多。
该视频显示了沿扶手施加的静载荷,我使它达到了35磅,但座椅滑轨螺柱滑出了,出乎意料的是,夹具没有松动。
** 2015年2月12日 我等待更换零件时,Lulzbot借给我借来的更换打印机。 我终于可以打印出新的测试铰链销,水平打印,它是黄色的...除了有点太大之外,它还很棒!是时候进行进一步的测试了...
一些视频:
** 2015年2月7日 我的打印机热端今天死了。我目前没有打印机,无法测试任何东西。很好的时机。
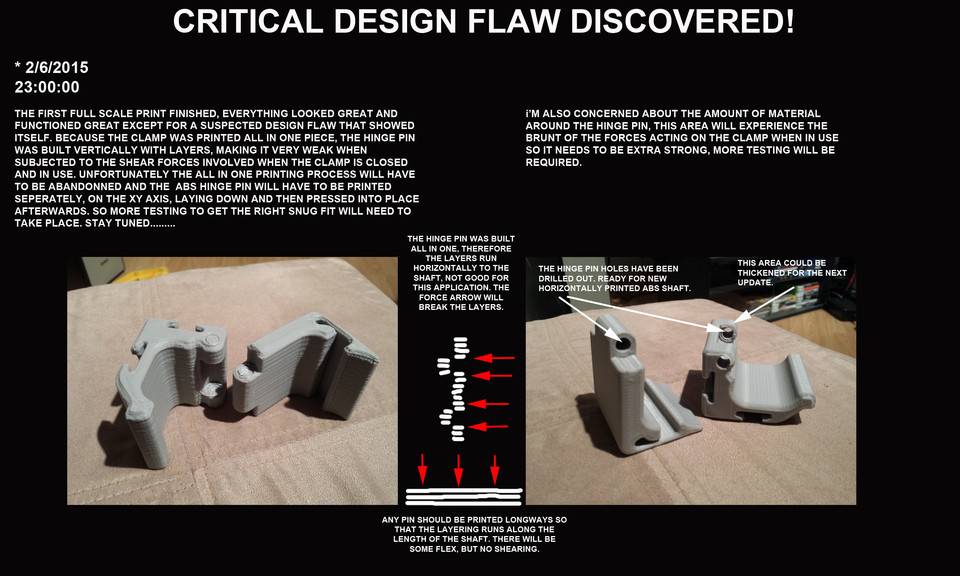
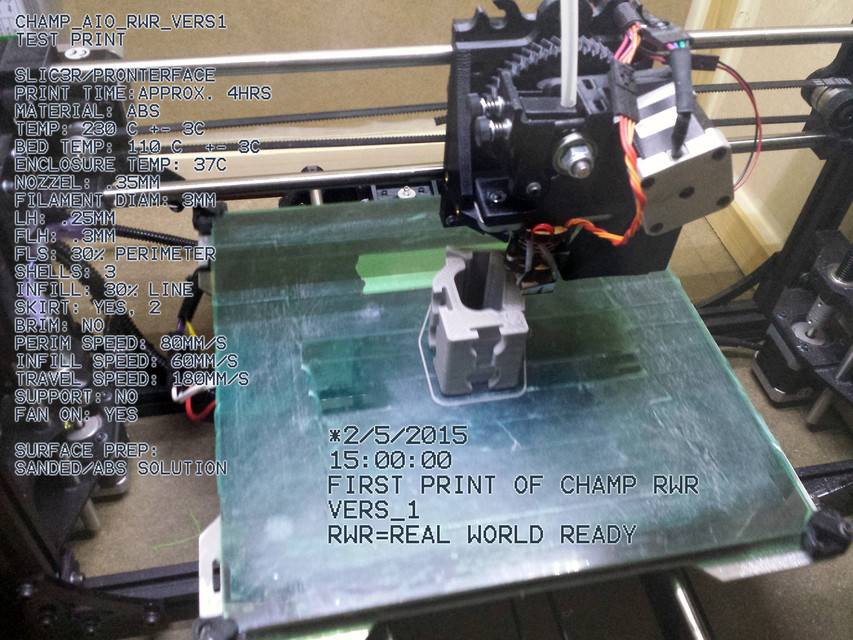
** 2015年2月5日(发现了关键设计缺陷)
15:00:00 刚开始打印全尺寸夹具设计。我很高兴看到结果如何。还剩几个小时。
video1(打印1.5小时): http://youtu.be/Mr4kF_yzdO4
video2(打印3.25小时): http://youtu.be/ug7GxhWpI3U
打印完成,玩了几分钟,将其扣到扶手上几次,尝试在其上施加一些力,将其扭曲等。然后销钉松开,层被剪断了……这是我想知道的一个问题关于。
别针必须单独打印,长时间坐在床上,然后再压入夹子中。该死的,想要一口气区分所有!敬请关注...
这是描述问题的视频: http://youtu.be/QeI88668h54
** 2015年1月26日在制品
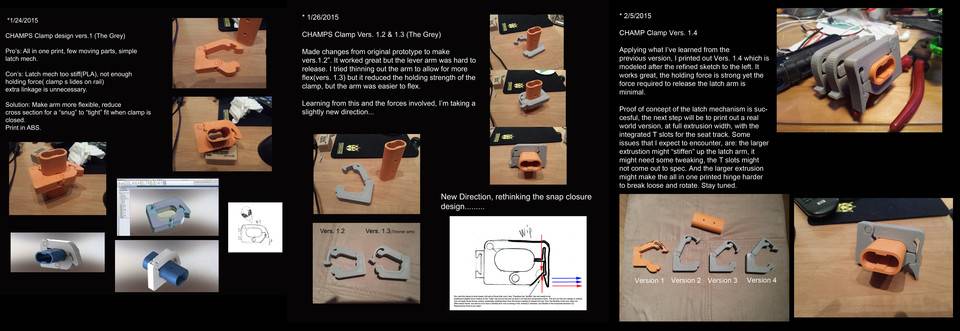
正如我的描述中所述,我刚刚完成了我的测试夹的1.4版(在视频中我误称为第3版)的打印,并从三个原始原型中吸取了教训,从而找出了设计Clip机制的最佳方法。该测试打印效果非常好,可以用力将其卡扣并锁定到位,根本不会沿着导轨滑动(测试打印厚度仅为0.5英寸,实际打印尺寸为4英寸!!!握得更紧)....现在,夹子可以轻松释放,我什至可以用小指释放它,根本不需要多大的力!
影片示范:
** 2015年1月26日在制品
刚刚添加了vers.1.2和Vers.1.3(细臂)测试的拼贴图像。 vers.1.3版的臂具有柔韧性,有助于释放夹紧力,但也会稍微减弱夹紧力。我对结果不满意,所以经过一番思考后,我朝着一个新的方向发展,请参考草图,尽快为新的夹子设计提供测试模型。
*** 2015年1月24日
考虑到我从第一个概念验证中学到的知识,我打印出了该设计的第2版。我已经附了一段带说明的视频。令我惊讶的是,夹子将夹子固定到位的方式非常牢固,非常牢固--- >>坚持这一概念并将其调整至完美。
** 2015年1月23日在制品
只是玩弄一个概念,今天就测试打印一个较小的横截面以测试该概念,尝试在设计中使用剪辑,但怀疑它是否有效或足够坚固。如果无法正常工作,我将使用螺栓.....敬请期待..
视频:
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250





