 资源下载
资源下载

【Demo】 基于tensorflow的图像分割算法deeplab_v3+

文件列表(压缩包大小 2.55M)
免费
概述
tensorflow-deeplab_v3_plus
参考rishizek的代码进行中文注释,并按照自己风格重新编写代码,对ASPP加入里BN层,支持摄像头。
deeplab_v3_plus简介
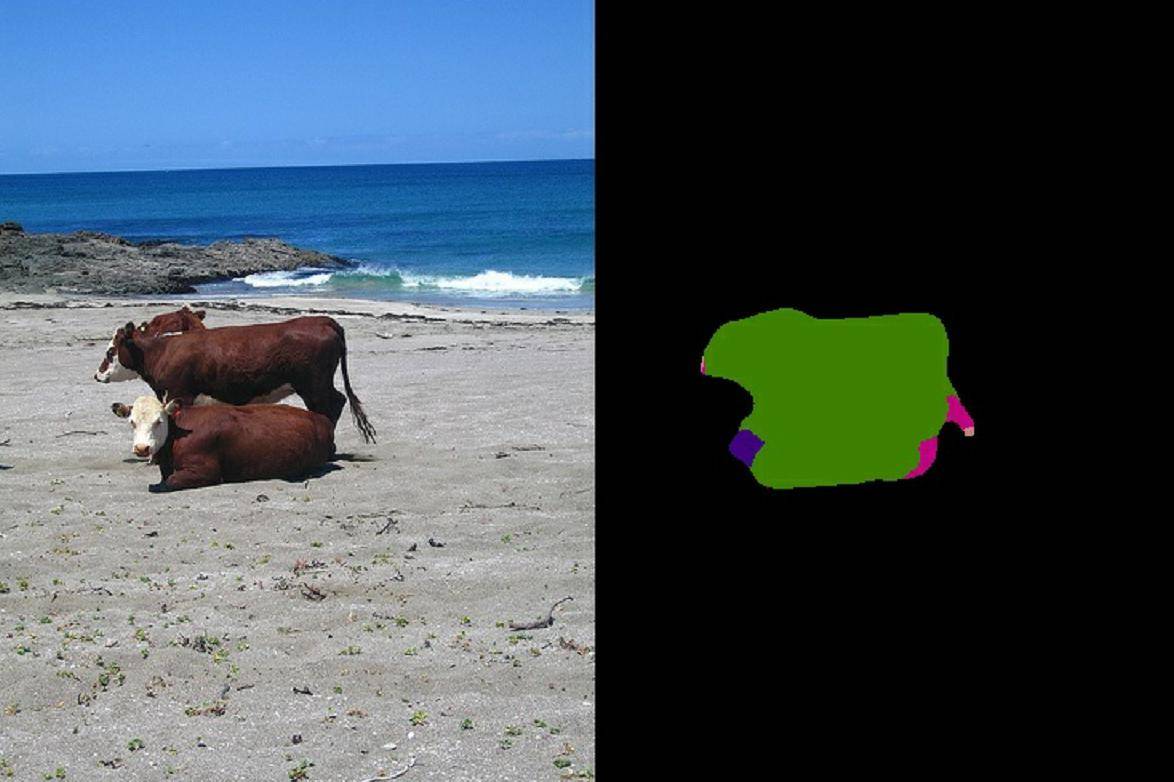
图像分割是主要功能是将输入图片的每个像素都分好类别,也相当于分类过程。举例来说就是将大小为[h,w,c]的图像输出成[h,w,1],每个像素值代表一个类别。
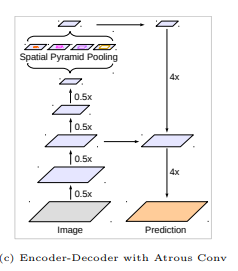
deeplab_v3+可以参考论文Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation。它的结构图如下:
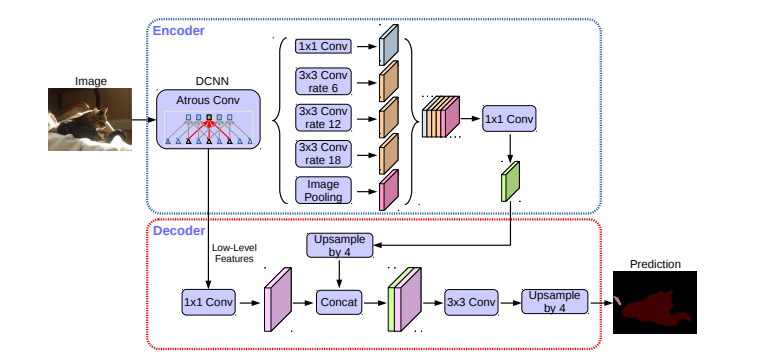
下面对模型进行简要分析
该模型属于encoder-decoder模型,encoder-decoder常用于自然语言处理中,在图像分割中U-net也是十分典型的encoder-decoder模型,大体结构如下:
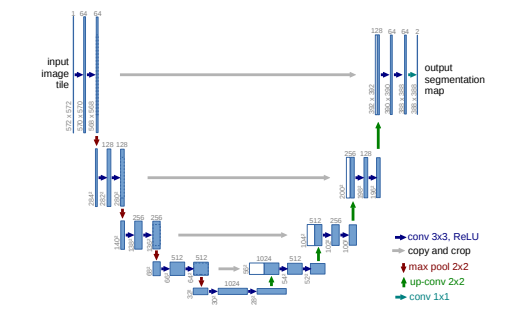
就是将图片通过卷积尺寸变小再通过上采样将尺寸还原。
deeplab_v3+是将encoder-decoder和ASPP相结合,encoder-decoder会获取更多边界信息,ASPP可获取更多特征信息。encoder网络使用resnet101或 Xception,本代码中使用的是resnet101。
采用预训练的resnet的某一节点A来获取图像信息,再加入到ASPP中。ASPP就是不同膨胀率的空洞卷积和全局池化上采样后的输出concat在一起,作为encoder输出部分。
空洞卷积可以理解为一个大卷积中间权重值都为0,举例说明,一个3x3的卷积,如果膨胀率是1就是正常卷积,如果膨胀率是2,就是空洞卷积,相当于把3x3的卷积每个值的右方和下方加一行或列都置0。变换之后的空洞矩阵大小变为6x6。空洞矩阵论文中说可以提取更密集的特征,捕获多尺度信息,相比于卷积和池化会减少信息丢失。全局池化就是将输入[h,w,c]池化成[1,1,c]。
decoder部分选取resnet中A节点之前的B节点,再将encoder的输出上采样成B的大小然后concat,做一些卷积和上采样就得到最终输出。
由于可以看成分类问题,该模型的损失函数也是交叉熵函数。模型具体实现可以参考代码
模型训练
环境要求
ubuntu=16.04 tensorflow=1.4.1 opencv=3.4.1 windows下可以进行测试
下载数据集
将VOC解压到data目录下,下载DrSleep提供的SegmentationClassAug文件解压,如果访问不了可以尝试这个网址里面有_MACOSX和SegmentationClassAug两个文件夹,将里面的SegmentationClassAug放置到./data//VOCdevkit/VOC2012/下,里面的图片是shape为[h,w,1]每一个像素值都对应类别的label。
将restnet预训练数据解压放置在该模型的根目录下。
如果需要模型预训练数据可以将我训练的权重数据解压,如果下载过慢可以尝试这个网址,将里面的ckpt等文件放置到./model下。
代码介绍
data放置VOC数据和数据处理生成的record文件和分化数据的txt文件
model放置训练生成的模型和graph
output放置测试图片生成的分割图像
picture放置测试用例,我的来源于百度图片
utils包含配置文件config.py,数据处理文件dataset_util.py,preprocessing.py和模型文件deeplab_model.py
test.py是测试文件支持摄像头
tfrecord.py是将处理完的数据生成record文件
train.py是训练文件
运行
手动配置config.py的信息或选择默认
若要训练: 运行python tfrecord.py生成record文件 运行python train.py训练。 对于计算机gpu选择需修改这里代码
若要测试: 运行python test.py
一些疑问
我的电脑配置是1080Ti但总是运行运行就溢出,我尝试用tf.contrib.distribute.mirroredstrategy多gpu并行,但tensorflow版本要1.8,当我更新完,发现input_fn要是data格式,我失败了。 如果有并行gpu的建议或者代码的指正请给我留言
结果展示



理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250







