资源下载
资源下载




握把工具ROBO3
文件列表(压缩包大小 5.74M)
免费
概述
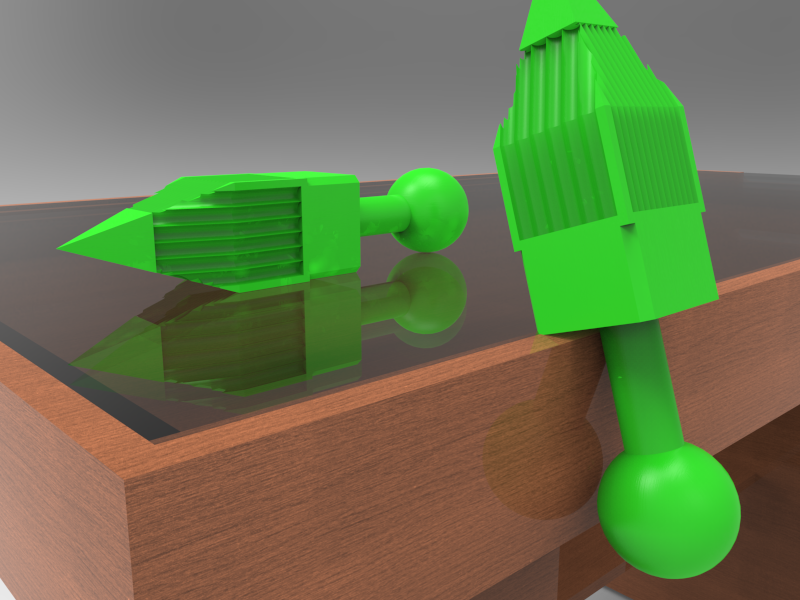
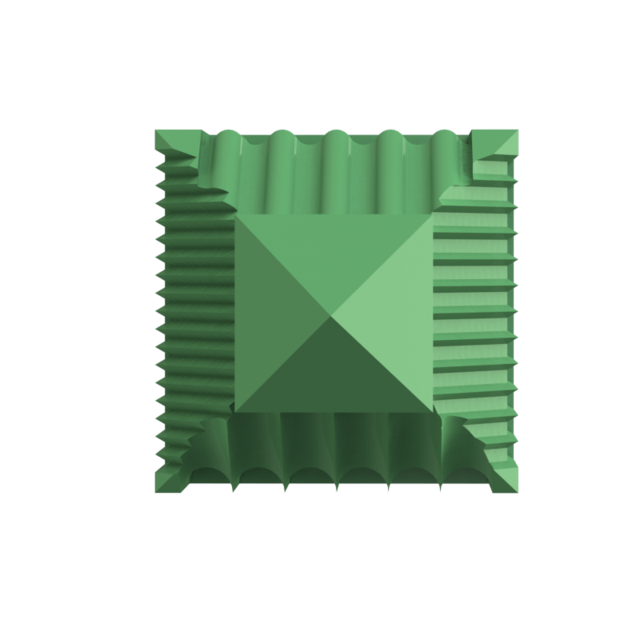
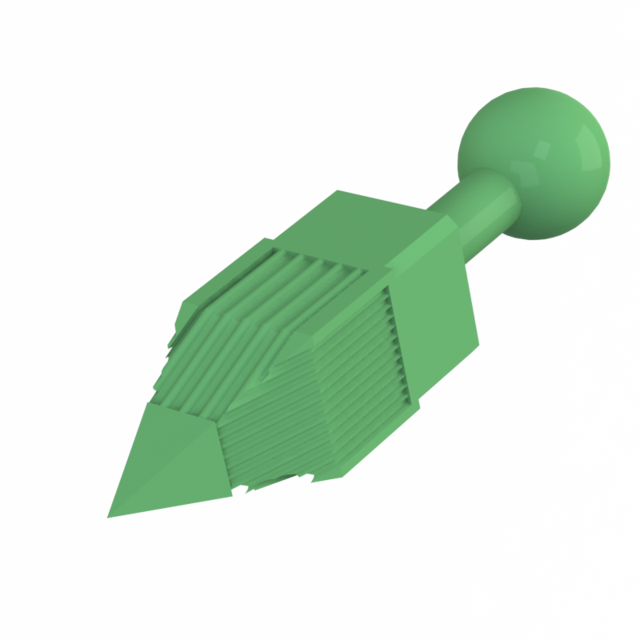
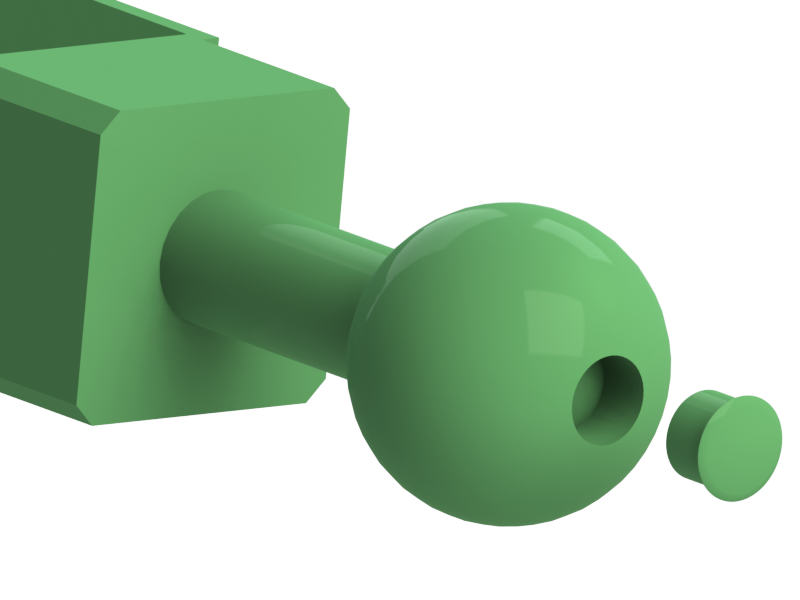
robo2和robo3之间的主要区别是空心结构和填充盖。 该对象包含了机械臂的所有挑战。 -用于多臂机器人和磁铁的球形表面 -用于爪式抓爪的金字塔 -一组用于吸力测试和磁体测试的光滑表面和不平坦表面 -爪形抓爪的平行表面 -人形机器人手的圆柱表面 +它是圣殿,可用于测试抓地力 +可以填充以增加重量 +增加的重量可能是流体或沙状,这给抓具增加了额外的挑战。 +可以充满铁磁粉尘以测试磁爪
该对象可以轻松缩放到所需大小,但我建议使用当前尺寸来测试从小到大的不同大小的手臂。 在最后一个渲染中显示了对象可以静止不动的两个稳定状态。 推荐的制造工艺-3D打印(精确的表面,丰富的材料选择)。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250