资源下载
资源下载
MK2差动斜度(2.845磅)
文件列表(压缩包大小 49.26M)
免费
概述
一段时间以来,我一直想使新的差速器转向,因为我的最后一个差速器(https://grabcad.com/library/frc-2-neo-differential-swerve-module-1)有一些改进的空间。在过去的几天里,我有一些空闲时间来设计一个新模块,所以我想与大家分享我的差异Swerve MK2。
与以前的模型相比,我想在此模型中改进3个关键领域。
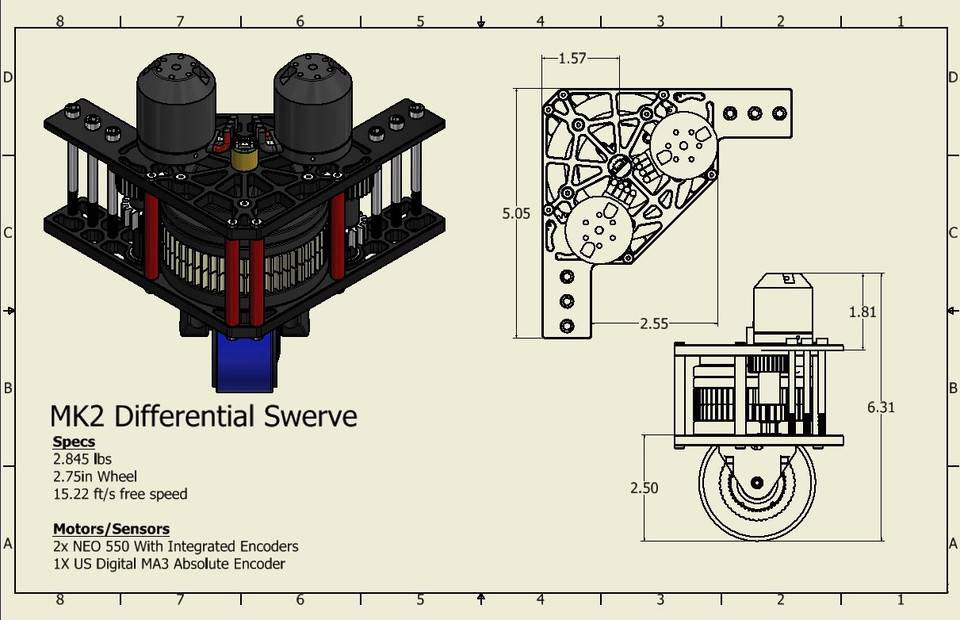
1)增加的离地间隙,与传统的转弯相当(目标约为1.5英寸至2.5英寸) 2)减轻重量(目标低于3磅) 3)减少了帧长度/宽度内的已用空间(X和Y目标中的Sub 3in)
仅凭这些要求,我在设计中还需要其他一些东西。
1)在发生机械故障时可以轻松更换。 2)与框架整合 3)车轮枢轴点尽可能靠近拐角,以实现更宽的轴距。 4)大量使用3D打印技术
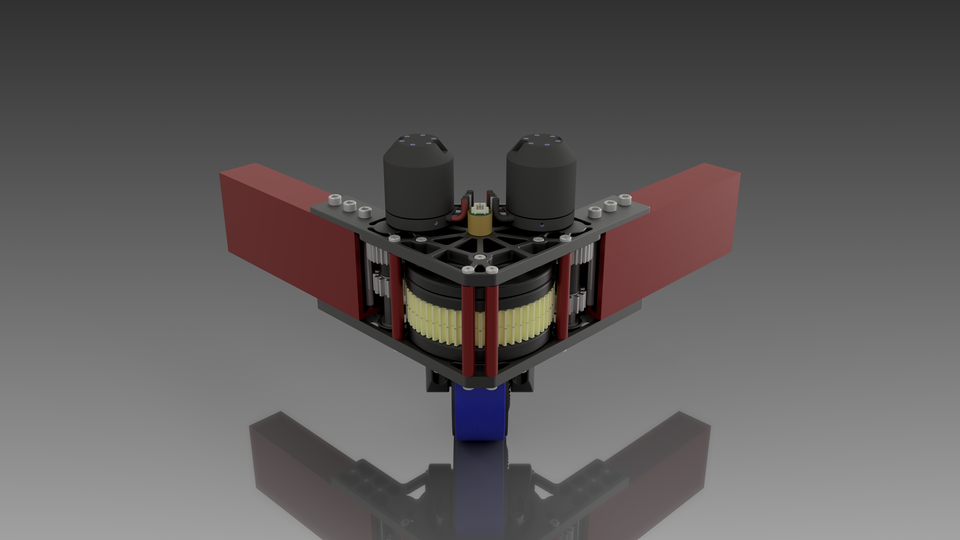
MK1和MK2之间的一些主要区别是:
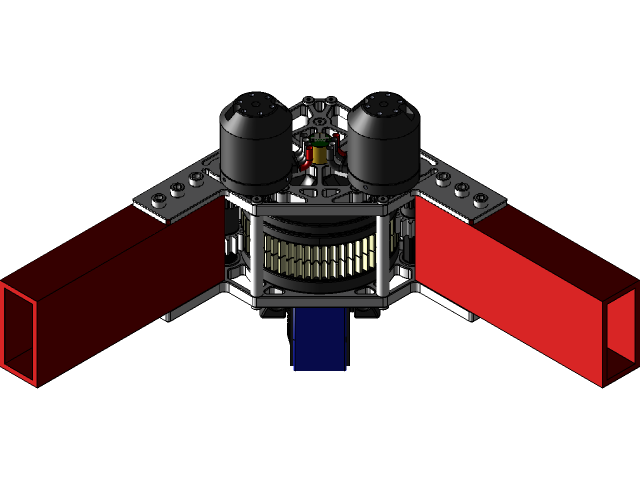
-新型差速器 -使用2x Neo 550s代替2x Neos -它不是嵌套在框架中,而是充当结构构件 -使用自定义轴承设置代替COT轴承以减轻重量
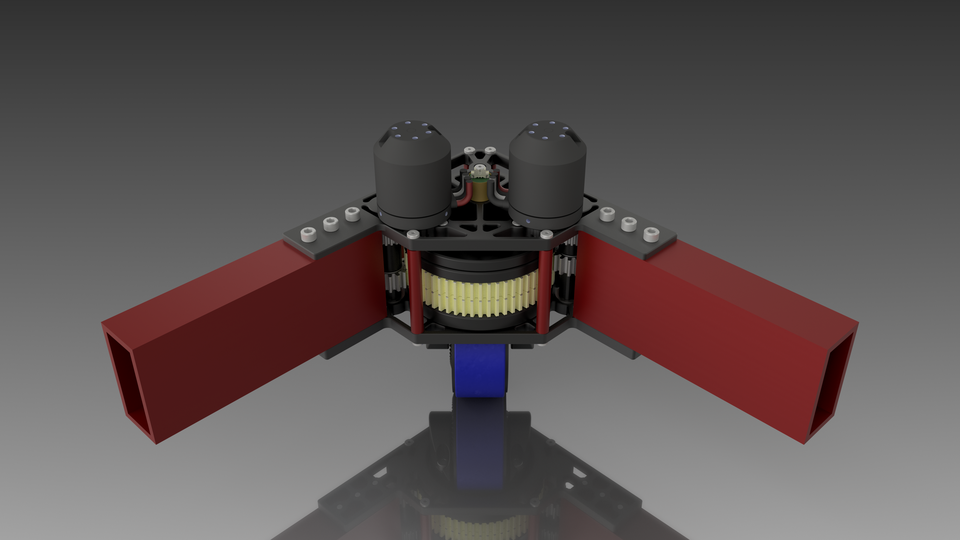
我选择了一种新型的差速器,主要是因为这样的设置可以轻松地根据要求更改离地间隙。与我在MK1上使用的差速器相比,新样式还更容易将其借给我的自定义轴承设置。我最初的计划是使用两个775 pro,而不是两个Neos,因为它们的直径较小,但是我最终选择使用两个rev new Neo 550,因为它们比775短并且带有集成编码器,但是这种设计很容易实现。修改为使用775个职业球员。
MK1模块嵌套在框架中,以减少其在框架内的占用空间。我决定将MK2集成为结构构件,而不是将MK2嵌套在框架中,主要有两个原因。首先要再次减少内部框架的占用空间。其次,如果需要/当需要更换模块时,允许模块能够斜着从框架中倾斜出来。
尽管此模块有很多用处,但是当/如果我设计的话,我将在MK3中进行一些改进。
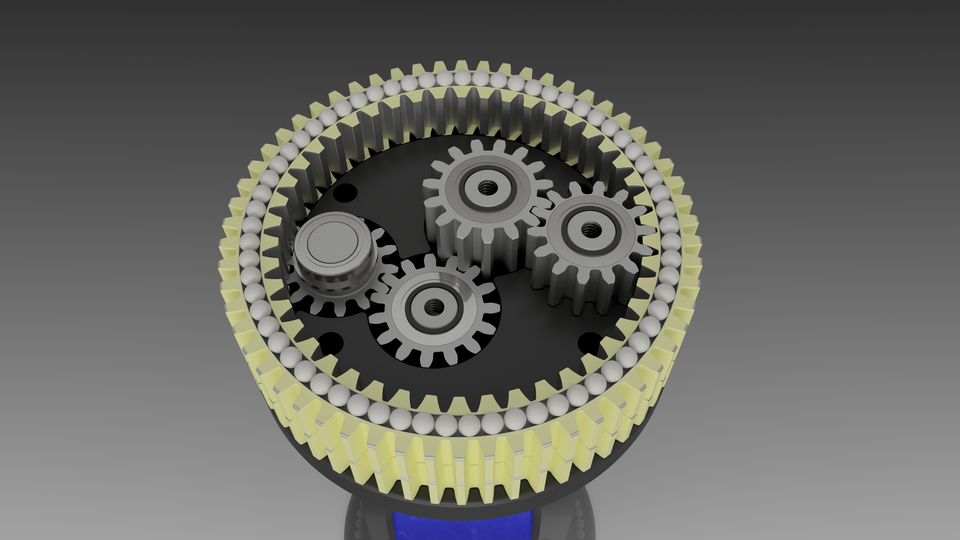
1)降低模块的总高度(4.5英寸以下) 2)减少对超高精度加工的需求。 3)减少大量修改/定制的COTS零件的数量(主要是在齿轮方面)。 4)减少零件数。 5)便于在安装时维修模块,以进行维修(当前,如果发生任何故障或要更换电动机,则需要更换整个模块)
一如既往,批评家,评论家和问题总是受到欢迎!
特雷弗·格拉森(Trevor Glasheen)
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250