 资源下载
资源下载
拾放机器人
文件列表(压缩包大小 9.00M)
免费
概述
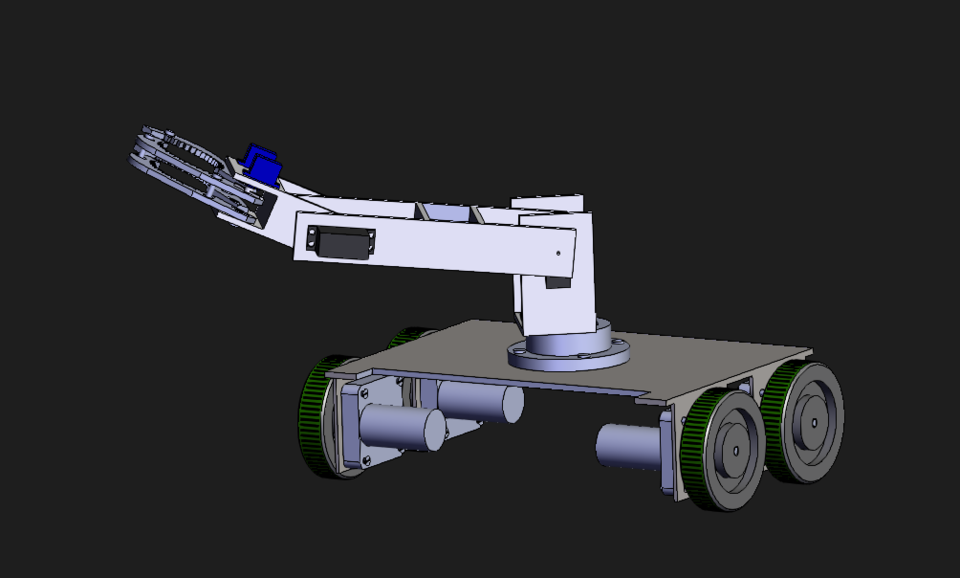
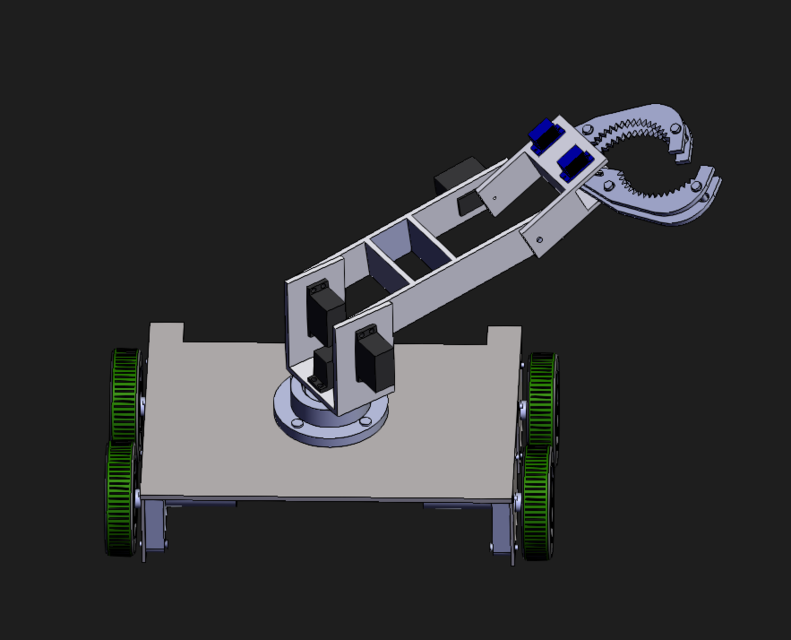
在Solidworks中设计的自动取放机器人,其手臂和电机驱动基座的自由度为4自由度。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250
拾放机器人
文件列表(压缩包大小 9.00M)
免费
概述
在Solidworks中设计的自动取放机器人,其手臂和电机驱动基座的自由度为4自由度。
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈
评论(0)






