资源下载
资源下载
SLAM导航、自动驾驶、深度学习、科研验证平台JUJON - 巨匠机器人
文件列表(压缩包大小 2.30M)
免费
概述
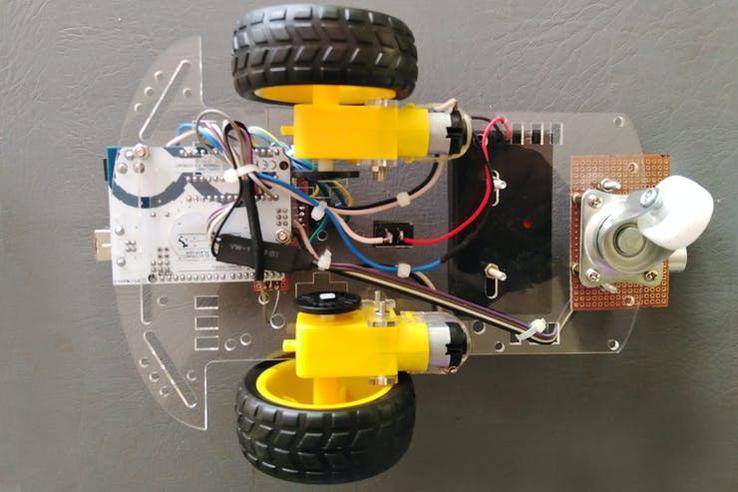
●路威”采用四轮四驱结构移动底盘,运动灵活、操控方便,下位机采用巨匠自研的基于STM32的运动控制系统,上位机采用英伟达Jetsonnano,可实现激光SLAM导航、图像识别、视觉跟随等功能,是高性价比的实验室研究、高校教学、企业算法验证的产品原型验证平台。机器人通过改变每侧车轮的速度,实现前进、后退、原地转向。四驱一体的控制板,通过串口向用户层实时反馈编码器和IMU信息,帮助用户实现机器人的定位导航。●JestsonNano预装ubuntu18.04系统,并出厂安装了rosmelodic次级系统。可以在学习各种AI算法的同时,学习ROS生态下的各种自动驾驶,导航算法。 ●平台采用开放型的设计,可灵活选配激光雷达(可适配思岚、SICK、北阳、镭神等品牌雷达),标配单目高清CSI接口相机,可选配双CSI接口相机,实现双目。预留有深度相机的接口,还可以验证各种好玩的视觉算法。可选配10.1寸的显示器,和飞鼠套装,使你脱离笔记本电脑,玩转AI+ROS。
发布单位:JUJON
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250