资源下载
资源下载

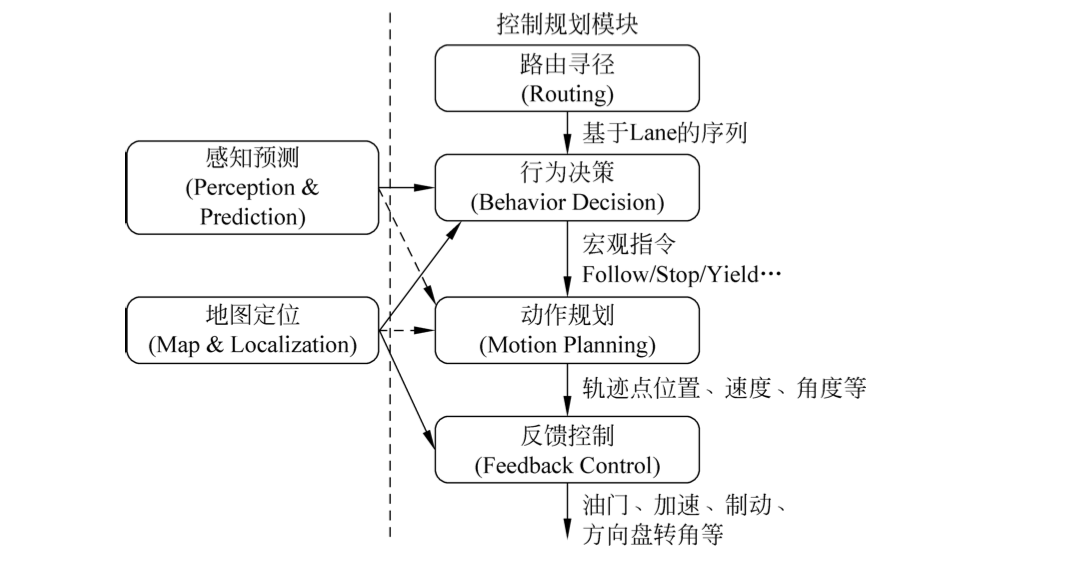
自动驾驶汽车作为一个复杂的软硬件结合系统,其安全可靠运行需要车载硬件、传感器集成、感知、预测以及控制规划等多个模块紧密协同配合工作。 其中最关键的部分是感知预测和控制规划的紧密配合。 规划 控制广义上可以分为路由径 ( Routing )、 行为决策 ( BehaviorDecision )、 动作规划 (MotionPlannin g ) 以及反馈控制(FeedbackControl ) 几个部分,如下图所示:
一、路径规划
路由寻径、行为决策、动作规划三个部分又可统称为路径规划。 路径规划部分承接上层感知预测结果,从功能上可分为全局路径规划和局部路径规划。
- 路由寻径
全局路径规划对应的是路由寻径部分,其作用可以简单理解为实现自动驾驶汽车软件系统内部的导航功能,即在宏观层面上指导自动驾驶汽车软件系统的规划控制模块按照什 么样的道路行驶,从而实现从起始点到目的地点。值得注意的是,这里的路由寻径虽然在一 定程度上类似传统的导航,但其细节上紧密依赖于专门为自动驾驶汽车导航绘制的高精地图,所以和传统的导航有本质不同。 它根据已知电子地图和起点终点信息,采用路径搜索算 法搜索出一条最优化的(时间最短、路径长度最短等)全局期望路径。
这种规划可以是行驶 前离线进行,也可以在行驶中不停地重新规划。 全局规划的作用在于产生一条全局路径指 引车辆的前进方向,避免车辆盲目地探索环境。 在规划全局路径时,不同的环境下常常会选 择不同的择优标准。在平面环境中,通常以路径长度最短或时间最短为最优标准。在越野 环境的全局路径规划中,经常以“安全性”为最优标准,该标准同时考虑路径可行宽度和路面 不平度来充分保证车辆的运行安全。 作为整体无人车控制规划系统的最上游模块,路由寻径模块的输出严格依赖无人车高精地图( HD-Map ) 的绘制。 在高精地图定义绘制的路网 ( RoadGrap h ) 的道路( Lane ) 划分的基础上,以及在一定的最优策略定义下,路由寻径模块需要解决的问题是计算出一个从起点到终点的最佳道路行驶序列。 路由寻径问题可以利用常见的 A* 算法或者 Dijkstra 算法来实现。
- 行为决策
路由寻径模块产生的路径信息,直接被中游的行为决策模块所使用。 行为决策模块接 收路由寻径的结果,同时也接收感知预测和地图信息。 综合这些输入信息,行为决策模块在 宏观上决定了自动驾驶汽车如何行驶。 这些行为层面的决策包括在道路上的正常跟车、在 遇到交通信号灯和行人时的等待和避让,以及在路口和其他车辆的交互通过等。
行为决策模块根据具体实现形式不同,在宏观上定义的输出指令集合也多种多样。 实现行为决策模 块的方法相对较多,而且不用遵循非常严格的规则。 实际上,在自动驾驶汽车系统设计中, 行为决策模块有时被设计成独立的逻辑模块,有时其功能在某种程度上和下游的动作规划 模块融合到了一起实现。 正是因为行为决策和动作规划需要紧密协调配合,在设计实现两 个模块时的一个重要的基本准则是,行为决策模块的输出逻辑需要和下游的动作规划模块 的逻辑配合一致。
行为决策层面汇集了所有重要的车辆周边信息,不仅包括了自动驾驶汽车本身的当前 位置、速度、朝向以及所处车道,还收集了自动驾驶汽车一定距离以内所有重要的感知相关 的障碍物信息。行为决策层需要解决的问题,就是在知晓这些信息的基础上,如何决定自动 驾驶汽车的行驶策略。 这些信息具体包括以下几点。
( 1 ) 所有的路由寻径结果:例如自动驾驶汽车为了到达目的地,需要进入的车道是什 么( tar g etlane )。
( 2 ) 自动驾驶汽车的当前自身状态:车的位置、速度、朝向、当前主车所在的车道、按照 路由寻径结果需要进入的下一个车道等。
( 3 ) 自动驾驶汽车的历史信息:在上一个行为决策周期,自动驾驶汽车所做出的决策 是跟车、停车、转弯还是换道等其他行为。
( 4 ) 自动驾驶汽车周边的障碍物信息:自动驾驶汽车周边一定距离范围内的所有障碍 物信息。 例如周边的车辆所在的车道,邻近的路口有哪些车辆,它们的速度、位置如何,以及 在一个较短的时间内它们的行驶意图和预测的行驶轨迹,周边是否有自行车骑行者或者行 人,以及他们的位置、速度、轨迹等。
( 5 ) 自动驾驶汽车周边的交通标识信息。
( 6 ) 当地的交通规则:例如道路限速,是否可以红灯右转等。
自动驾驶汽车的行为决策模块,就是要在上述所有信息的基础上,做出如何行驶的决 策。 自动驾驶汽车的行为决策模块是一个信息汇聚的地方。 由于需要考虑如此多种不同类 型的信息及受到非常本地化的交规限制,行为决策问题往往很难用一个单纯的数学模型来 解决。
- 动作规划
局部路径规划对应的是回答最上方的图中的动作规划模块,以车辆所在局部坐标系为准,将全局期望路径根据车辆定位信息转化到车辆坐标中表示,以此作为局部参考路径,为局部路径规划提供导向信息。 局部期望路径是自动驾驶车辆未来一段时间内期望的行驶路线,因此 要求路径的每一点都可以表示车辆状态的信息。 局部期望路径可以理解为自动驾驶车辆未 来行驶状态的集合,每个路径点的坐标和切向方向就是车辆的位置和航向,路径点的曲率半 径就是车辆转弯半径。 车辆在实际行驶中,位置、航向和转弯半径是连续变化的,那么生成 的路径也要满足位置、切向方向和曲率的连续变化。 局部路径规划的作用是基于一定的环 境地图寻找一条满足车辆运动学约束和舒适性指标的无碰撞路径。 规划出来的局部路径必 须具备对全局路径的跟踪能力与避障能力,如基于路径生成与路径选择的局部路径规划方 法,路径生成中完成了对全局路径的跟踪,路径选择完成了障碍分析。
本回答的主要内容来自图书《自动驾驶技术概论》,清华大学出版社