资源下载
资源下载

1
激光雷达(LIDAR,英文:light detection and ranging),是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号,然后将接收到的从目标反射回来的信号与发射信号进行比较,作适当处理后,就可获得目标的有关信息。
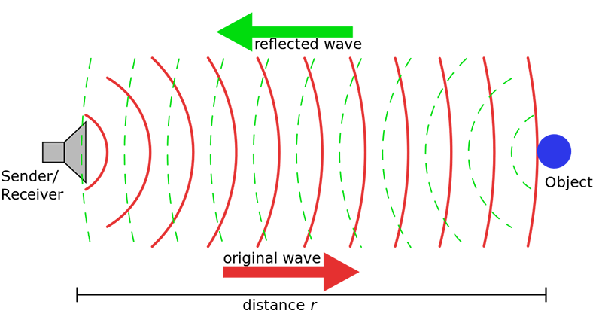
从技术上讲,与声纳原理相似。 激光雷达(LIDAR)没有单一的标准,但是在自动驾驶汽车技术上可能会看到的大多数装置都是这样工作的: 1.使用发射器发射出不可见的激光脉冲(低能量且对眼睛安全) 2.使用检测器捕获反射的光子。如果光子没有撞到东西,它将不会返回。 3.使用光子返回所需的时间来计算光子撞击到物体的距离。 4.旋转时每秒最多执行一百万次。 5.将结果数据点组装到3D网格上的“点云”中。 6.使用“点云”计算出激光所见物体的大小和形状,以创建可见表面和开放空间的图片。
创建每个点的实际过程几乎与你想象的一样复杂,但是其背后的原理并不难掌握。 与你看到激光笔或手电筒照在任何表面上的原理基本相同,你看到光是因为它被反射回你的眼睛,并且你的大脑可以根据光的反射来或多或少地判断该物体的距离。
雷达的无线电波范围较远,但它们往往会穿过某些物体;而声纳的声波在空中的覆盖范围也不大,但是,光线传播得足够有长,并且可以被几乎所有固体表面反射,因此非常适合获取细节。而它也比无线电波或声波都要快得多。
收藏
不错!图文并茂