资源下载
资源下载
本质上,对于任何机器学习问题,都可以将数据点分为两个部分:模式+随机噪声。 例如,如果你要为公寓的价格建模,你会知道价格取决于公寓的面积。因此这个因素促成了这种模式:更多的卧室通常会导致更高的价格。但是,具有相同面积的公寓,会随着卧室数量的不同导致价格的不完全相同。其中,价格的变化就是噪音。 再举一个例子,比如考虑开车。给定具有特定曲率的曲线,则存在最佳的转向方向和最佳速度。当你在该曲线上观察到100个驾驶员时,其中大多数将接近最佳转向角和速度。但是它们不会具有完全相同的转向角和速度。同样,道路的曲率会影响转向角和速度的模式,然后会产生噪声,导致偏离该最佳值。 现在机器学习的目标是对模式进行建模并忽略噪声。一个算法除了试图拟合模式外,还试图拟合噪声,这就是过度拟合,而一个算法在试图避免拟合噪声时错过了模式,它就是欠拟合。 过拟合的迹象:样本内误差低,样本外误差高。 拟合不足的迹象:样本内误差高,样本外误差高。
在有监督的设置中,通常希望将预测函数的输出与训练标签相匹配。因此,在上面的驾驶示例中,需要准确预测转向角和速度。随着不断添加越来越多的变量(例如道路的曲率,汽车的模型,驾驶员的经验,天气,驾驶员的情绪等),你将倾向于对训练数据做出越来越好的预测。
然而在一点之外,添加更多的变量也无助于对模式进行建模,而只是试图拟合噪声。由于噪声是随机的,因此不能很好地推广到看不见的数据,因此您的训练误差和测试误差均较小。
请考虑以下情形:
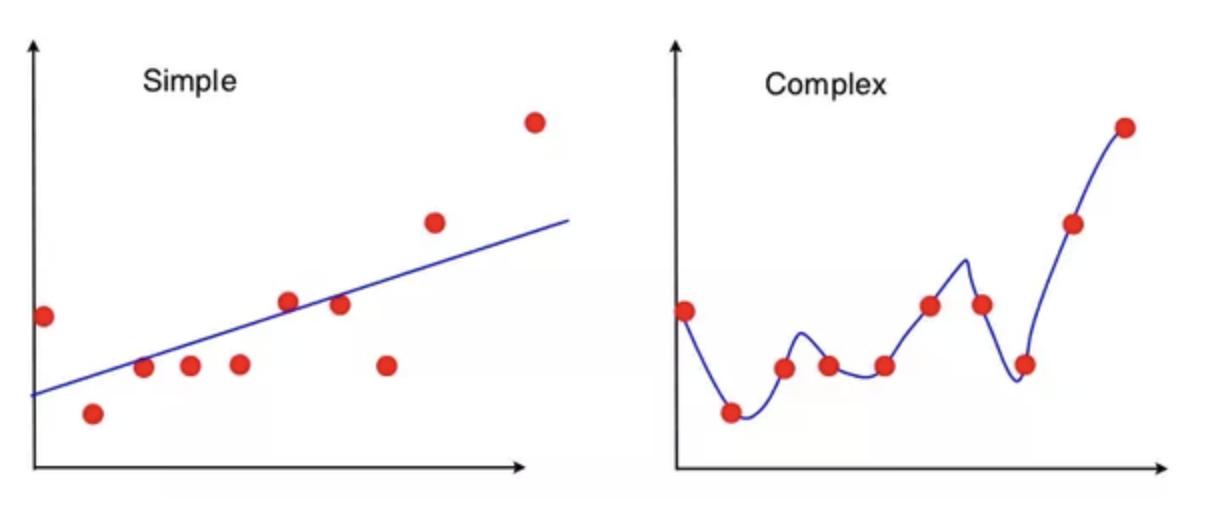 左边的算法返回给定这些点的最佳拟合线,而右边的算法返回给定的n点的度k的最佳拟合多项式。 (在此示例中,k是一个较大的数字,例如10。)
如果将最低点向上移动一定距离会怎样?
左图中的线变得稍微平一些,在左侧向上移动一点,在右侧保持大约相同的位置。但是,右侧的曲线变化很大,你在第1点和第3点之间看到的跌落可能会完全消失。
显然,右侧的算法正在拟合噪声。从该示例可以看出,减少过度拟合的方法是人为地惩罚高阶多项式。这确保了只有在与较简单的模型相比可以显着减少误差的情况下,才选择更高阶的多项式来克服惩罚。
你可以创建一个类似的示例来演示欠拟合,可以使用二次函数对模式进行建模的数据。然后,如果使用线性函数作为预测变量来避免拟合噪声,则也将无法很好地拟合模式。
左边的算法返回给定这些点的最佳拟合线,而右边的算法返回给定的n点的度k的最佳拟合多项式。 (在此示例中,k是一个较大的数字,例如10。)
如果将最低点向上移动一定距离会怎样?
左图中的线变得稍微平一些,在左侧向上移动一点,在右侧保持大约相同的位置。但是,右侧的曲线变化很大,你在第1点和第3点之间看到的跌落可能会完全消失。
显然,右侧的算法正在拟合噪声。从该示例可以看出,减少过度拟合的方法是人为地惩罚高阶多项式。这确保了只有在与较简单的模型相比可以显着减少误差的情况下,才选择更高阶的多项式来克服惩罚。
你可以创建一个类似的示例来演示欠拟合,可以使用二次函数对模式进行建模的数据。然后,如果使用线性函数作为预测变量来避免拟合噪声,则也将无法很好地拟合模式。