资源下载
资源下载


欠驱动自动水下航行器
文件列表(压缩包大小 71.47M)
免费
概述
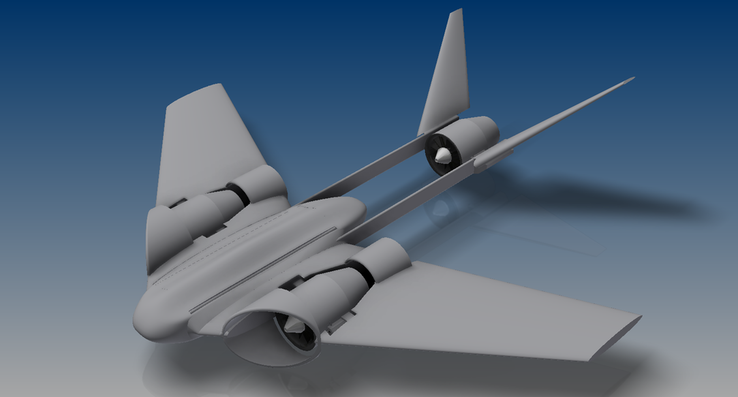
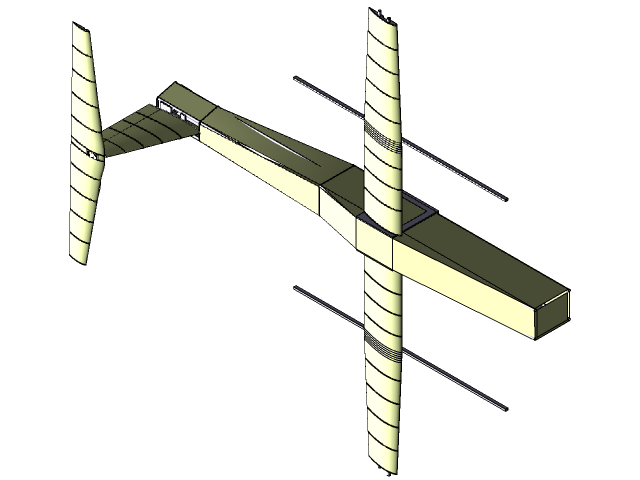
为UBC的自主水下航行器团队构建的基础测试平台。 2018年提交给RoboSub竞赛。该设计仅具有4个执行器,因此具有6个自由度。重力和浮力用于保持对车辆的俯仰和侧倾的控制。该车辆被设计为未来几年用来测试软件和电子产品的开放式构建平台。两个主要的干燥箱和4个推进器均来自Blue Robotics。摄像机外壳是为该项目定制的。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(1)

0/250
下载后的评价
感恩分享!
2023-08-26
回复