 资源下载
资源下载

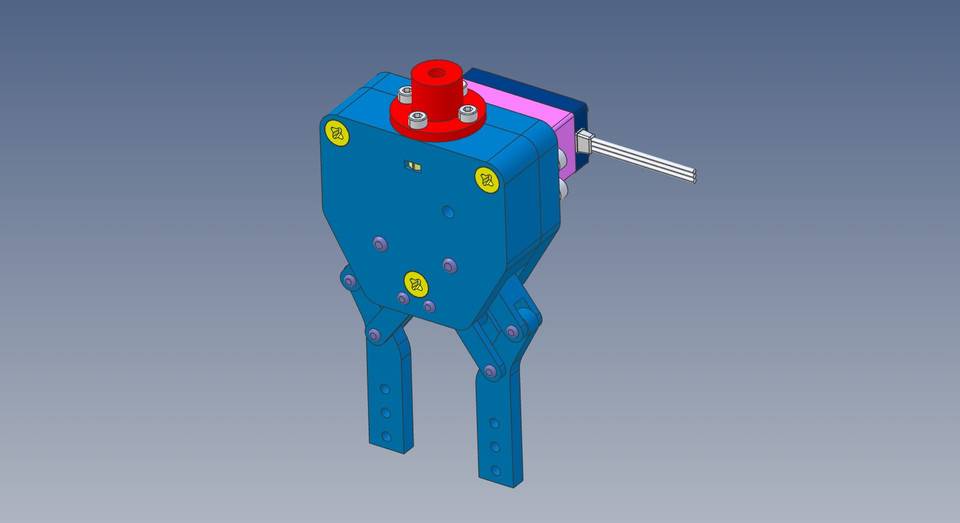
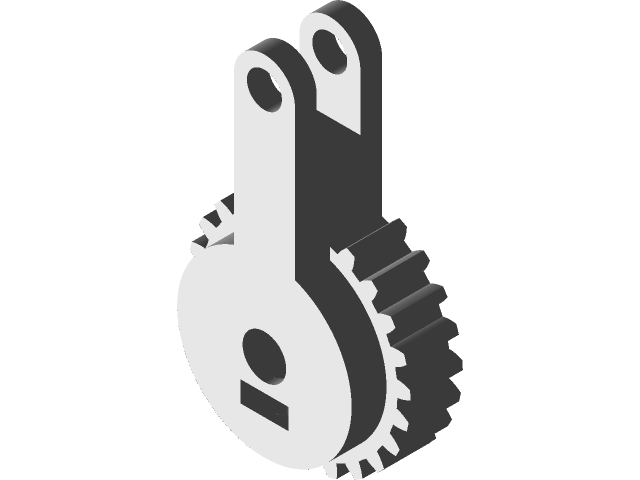
带有伺服器的机器人平行夹爪
文件列表(压缩包大小 9.74M)
免费
概述
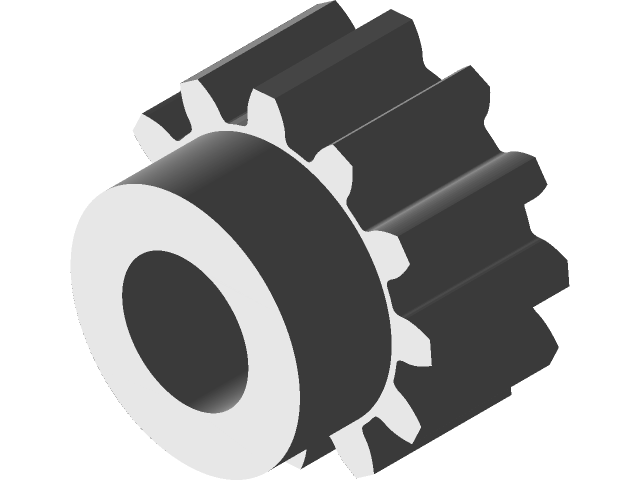
这种机器人抓手是众多已公开的抓手之一。 我的设计规格是: -使用全金属齿轮伺服 -枢轴点为空轴(DIN 7 h7质量) -齿轮比2 -附在我的6轴机器人手臂上 -能够接收抓爪力传感器(计划升级)
您会注意到,齿轮和平行臂在侧部内部之间留有间隙。我在组装过程中用厚度为0.5毫米的IGUS TRIBO-TAPE填满了这一点。 您看到的大多数设计都是在塑料之间摩擦,那是不行的。
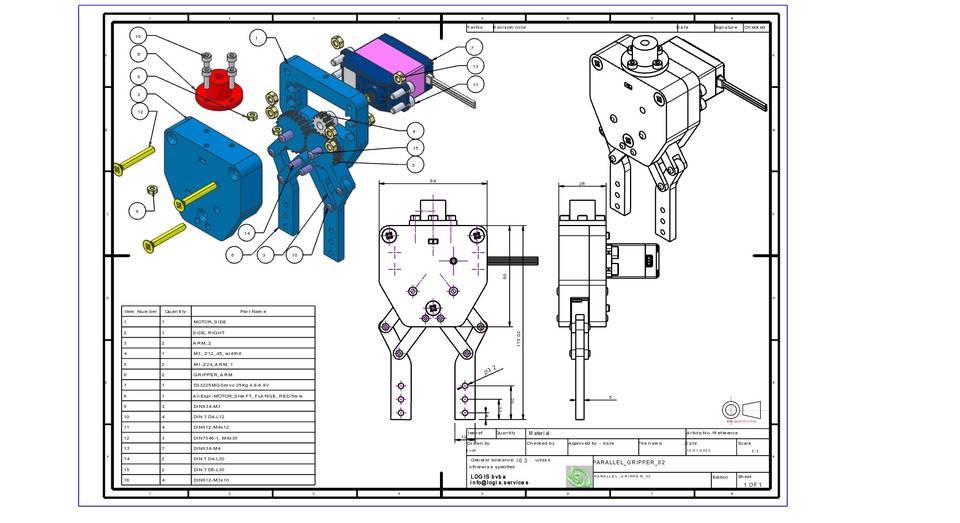
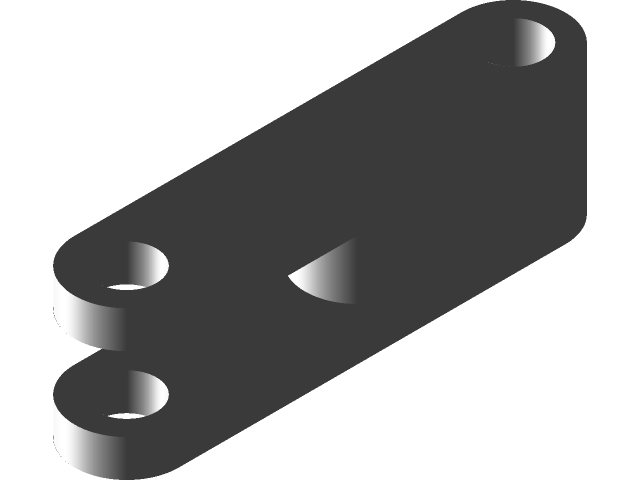
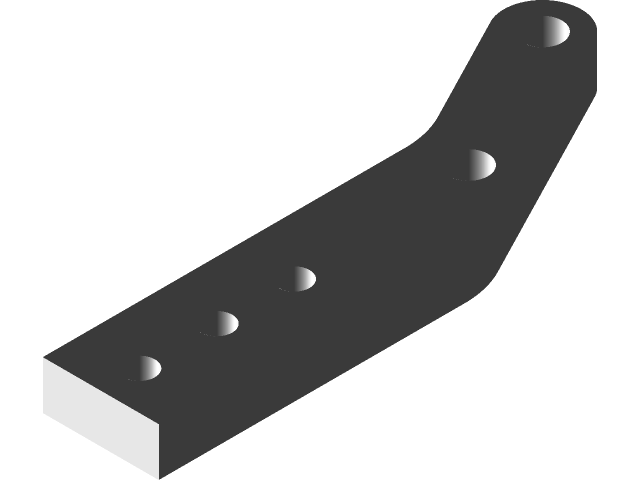
其中包含一个步骤文件,供您自定义夹臂。
为了理解设计,我添加了一个3D pdf文件,以便您操纵装配以及所有零件。只需在acrobat reader中打开此文件,双击图片并接受即可打开3D操作视图。使用零件树,您可以打开和打开所需的零件。 还包括带有分解图的pdf以及零件清单。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250






