资源下载
资源下载



两栖五关节六足机器人
文件列表(压缩包大小 286.73M)
免费
概述
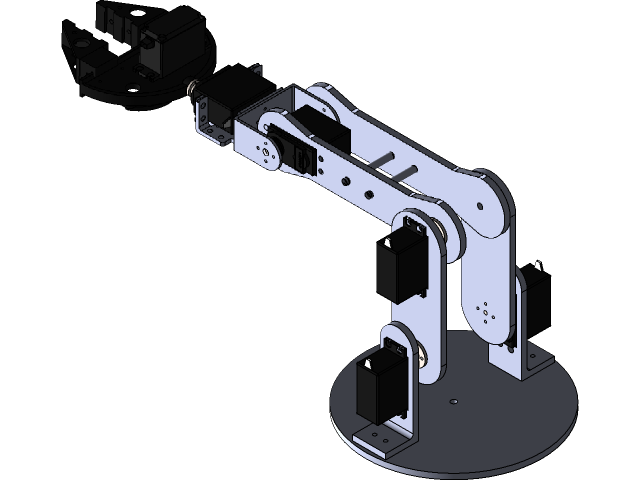
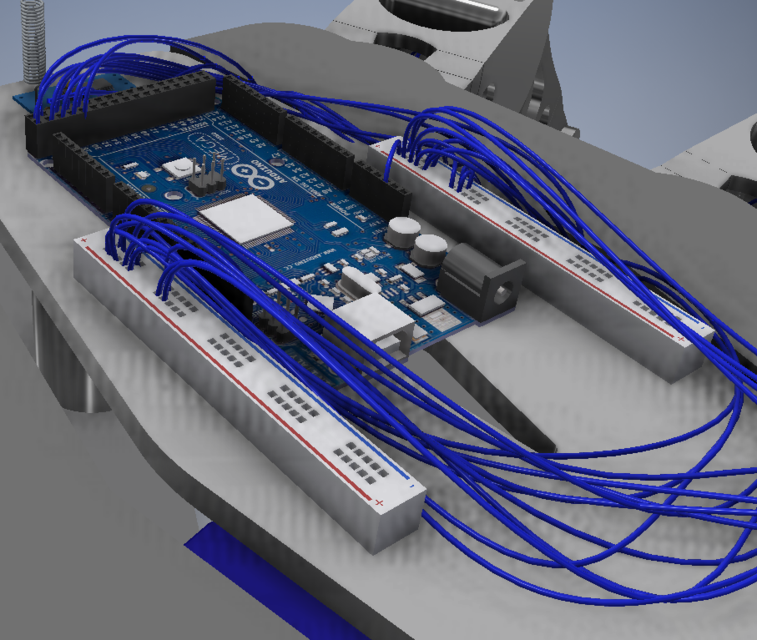
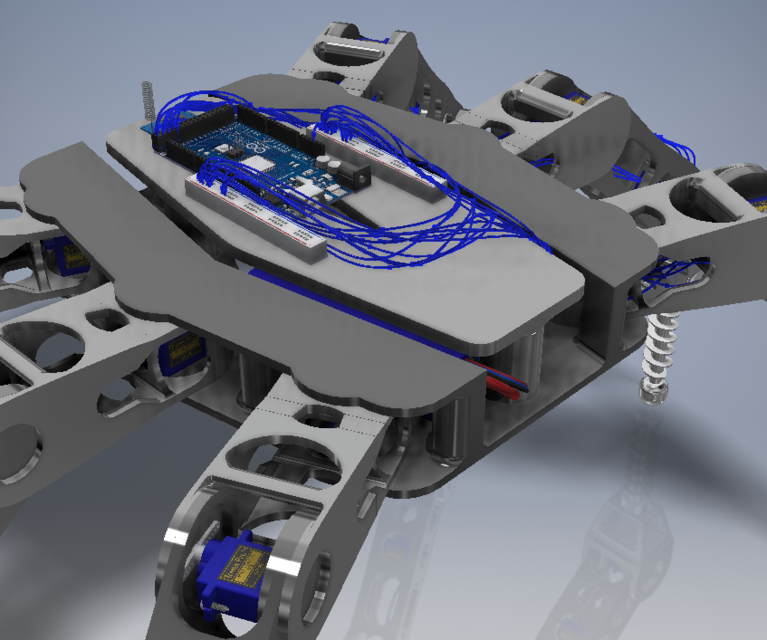
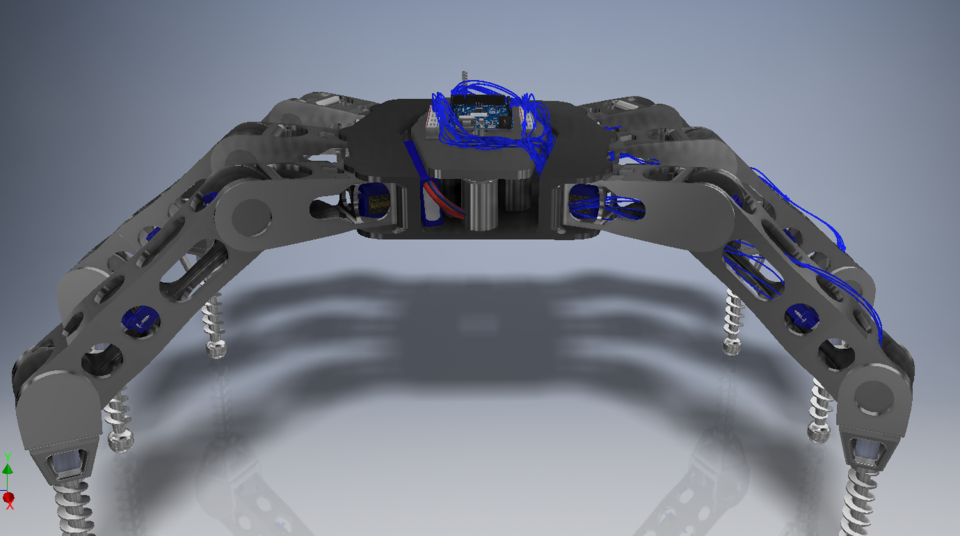
这是我的两栖5关节六足机器人的最终版本,该设计的一侧布线以显示腿部相对于Arduino的运动方式。我还附上了一张图片,显示了机器人的整个运动范围。有关如何连接Inventor的教程在我的页面和youtube上。进行此设计的目的是使您可以3D打印它,尽管您需要购买所有的电子组件。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250
两栖五关节六足机器人
文件列表(压缩包大小 286.73M)
免费
概述
这是我的两栖5关节六足机器人的最终版本,该设计的一侧布线以显示腿部相对于Arduino的运动方式。我还附上了一张图片,显示了机器人的整个运动范围。有关如何连接Inventor的教程在我的页面和youtube上。进行此设计的目的是使您可以3D打印它,尽管您需要购买所有的电子组件。
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈
评论(0)