资源下载
资源下载


自由程度
文件列表(压缩包大小 91.68M)
免费
概述
现有假肢的缺点
a)缺乏对物体形状的适应性,因此 对于不同类型的操作,需要更换端子。由于与驱动机构的刚性连接,我们具有以下优点 负面影响:第一根手指与物体接触后, 其他手指的动作受阻。 b)。第二个问题,是第一个问题:假体的固定能力不成比例 电缆上的力。我们无法确定拍摄对象是否被牢牢抓住。 с)。假肢猛禽类型更适合快速捕获小物品(例如网球)。 它们不能提供很大的保持力(恕我直言)。
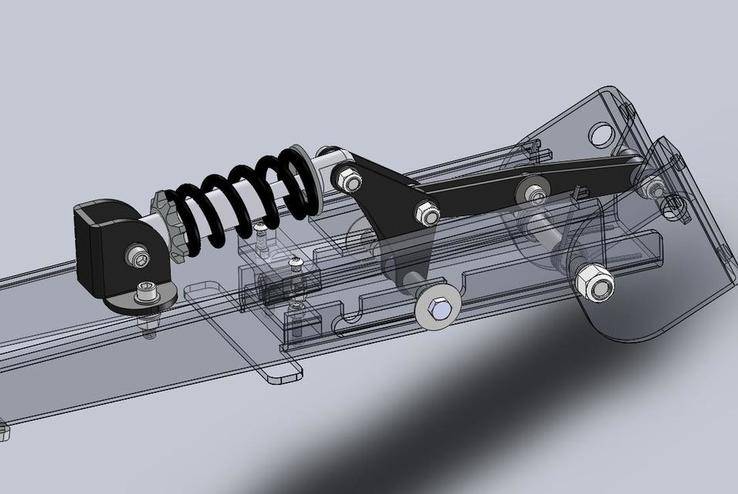
我们如何解决这些问题?最完美的解决方案:使用液压 系统包含可弯曲的柔性手指液压,仪表板,阀门,反馈传感器,控制器。 这样的系统将是昂贵的。但是我们可以对液压系统进行近似的机械模拟。
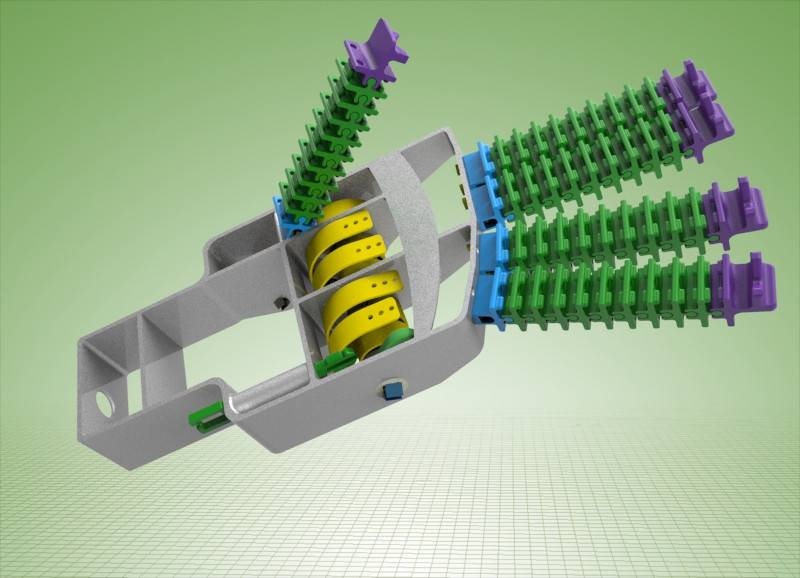
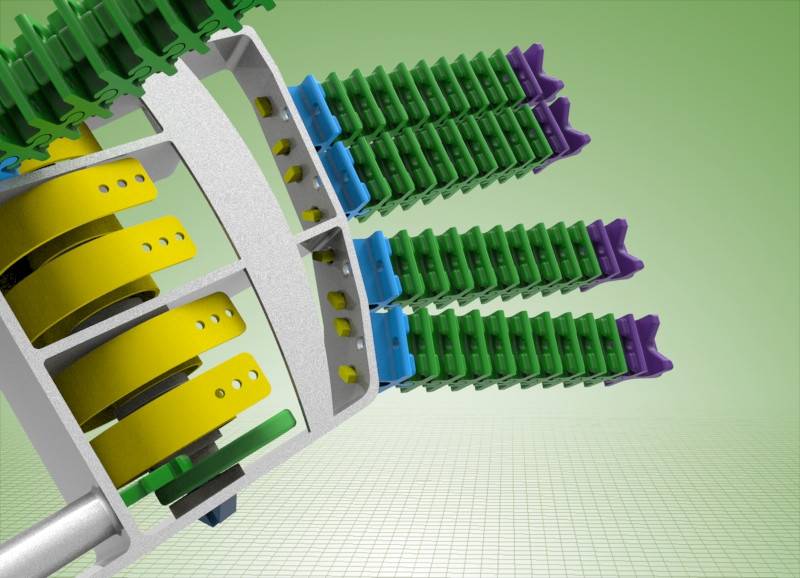
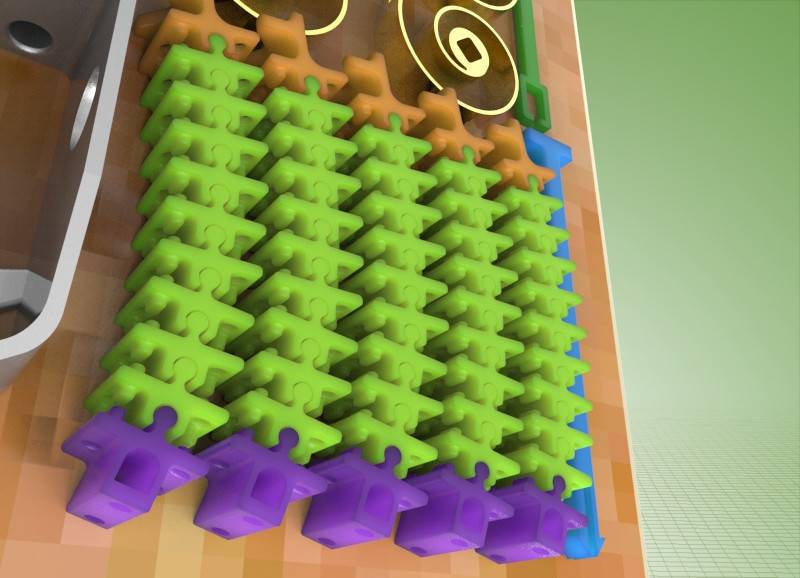
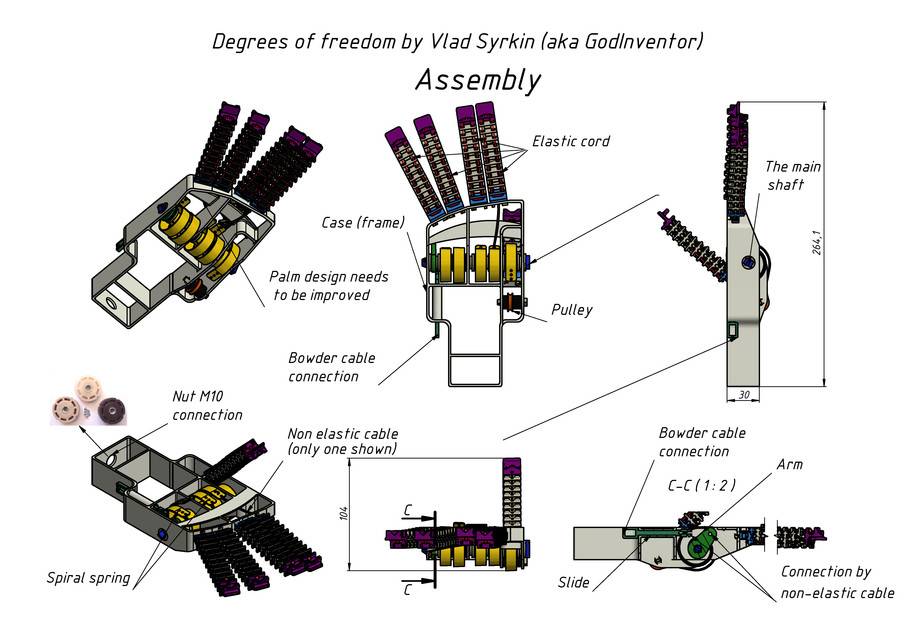
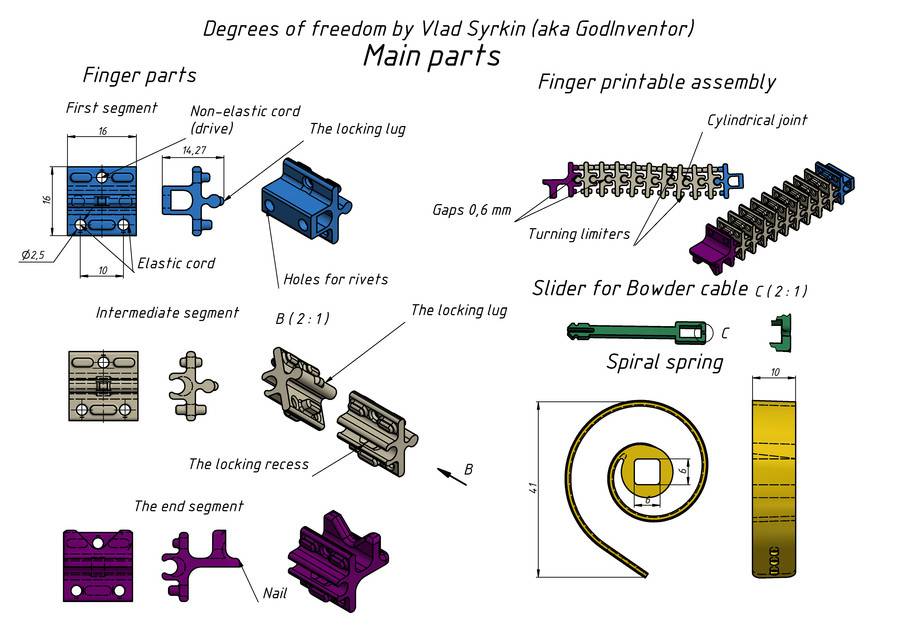
关键思想提供了额外的自由度,以确保适应性。 第一个自适应元素-手指。 由于设计的原因,Finger可以捕获不同形状的物体,类似于自行车链条。 每个手指元件都可以朝手掌侧弯曲20度。屈曲提供的非弹性电缆 通过两条弹性电缆将其返回到中间位置。 手指可以完全打印。 第二个自适应元件-螺旋弹簧。 当手指触摸物体时,电缆的移动会顺着他弯曲的方向并覆盖物体。 力很小,螺旋弹簧的直径实际上保持不变。 弹簧仅与主轴一起旋转。弯曲后,电缆的进一步移动会导致电缆减少 弹簧直径的大小和保持物体的力成比例地增加。 如果手指没有与物体接触,则不会使用第二自由度。 每个手指可以根据对象的形状进行单独的移动和施加力。 这个想法在概念层面上得到了解决。它需要进一步的改进和生产准备。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250