 资源下载
资源下载
机器人夹爪机构
文件列表(压缩包大小 1.64M)
免费
概述
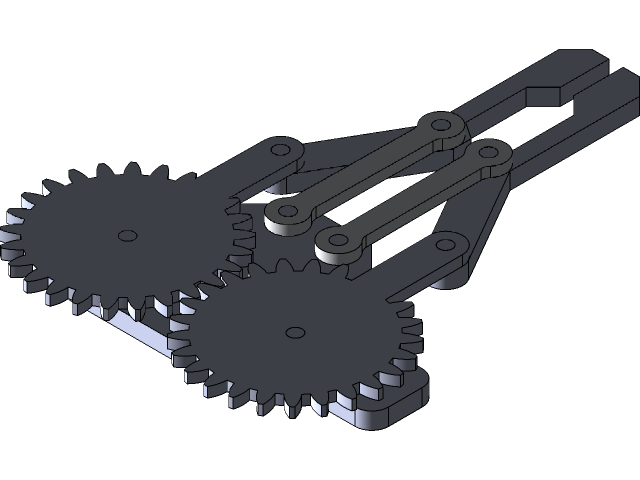
机器人抓取器机制用于在不可能直接进行人工干预的情况下抓取物体。例如:-热室。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250
机器人夹爪机构
文件列表(压缩包大小 1.64M)
免费
概述
机器人抓取器机制用于在不可能直接进行人工干预的情况下抓取物体。例如:-热室。
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈
评论(0)






