资源下载
资源下载



杆架概念4:机器人
文件列表(压缩包大小 64.74M)
免费
概述
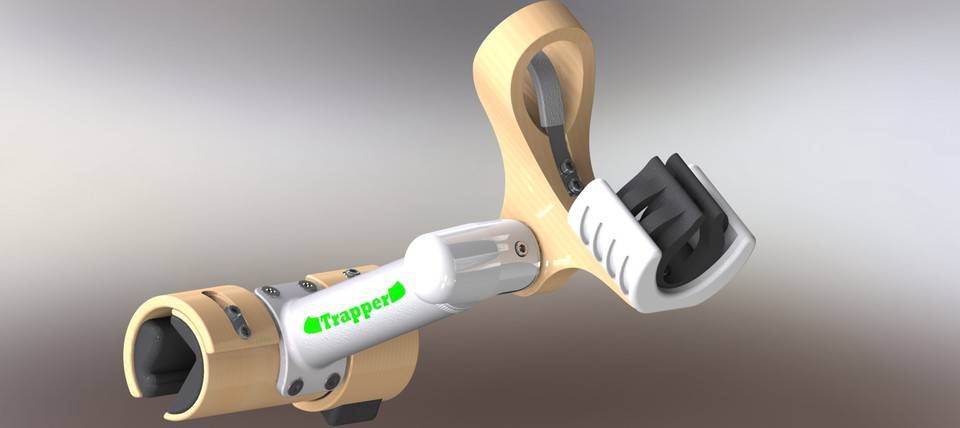
设计理念:不惜一切代价取消旋钮接口,但仍保持与使用旋钮的设计相同的灵活性,自由度,强度和美感。
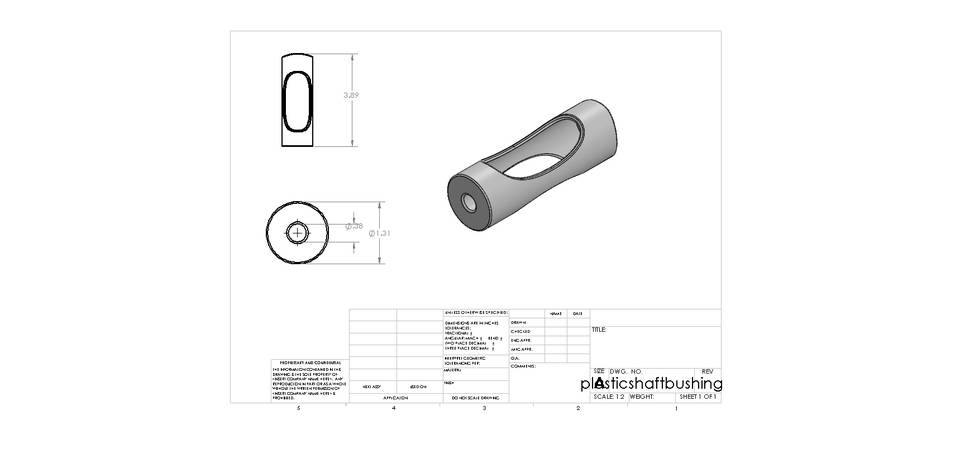
材料:木材,可回收和不可回收的橡胶,可能可回收的塑料,铝。理想情况下,材料将与铝制管材和机械一起使用,但是我设计的材料足够坚固,因此每个零件(橡胶部件和弹簧除外)都可以进行3D打印。有关3D打印零件的一些粗略估算,请参见http://shpws.me/pv6H、http://shpws.me/puAX、http://shpws.me/pv6P
预算范围:中端。尽管看似复杂,但大多数机械部件都可以用铝进行CNC CNC加工,以合理的成本进行3D打印或注塑。
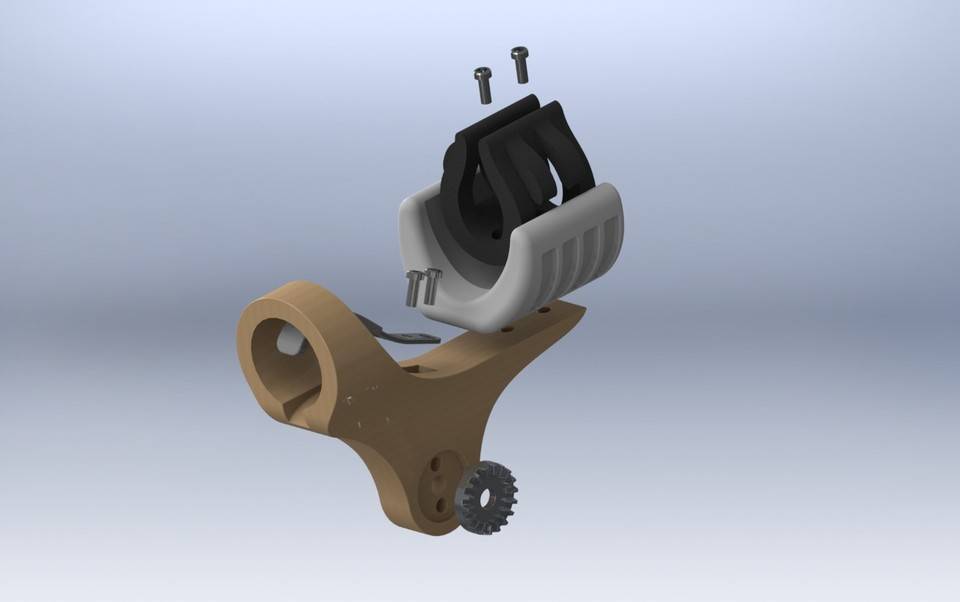
因此,在此设计中,尽管其结构似乎比以前的概念更为复杂,但其主要思想是取消了任何种类的手动调节旋钮,并为用户提供了裸露形式的可调节性。使用机器人,用户不必知道他正在对他/她的杆进行一系列复杂的调整,仅是为了获得所需的角度,他们只需要将杆指向自己想要的方向就可以了那里好,锁定位置。
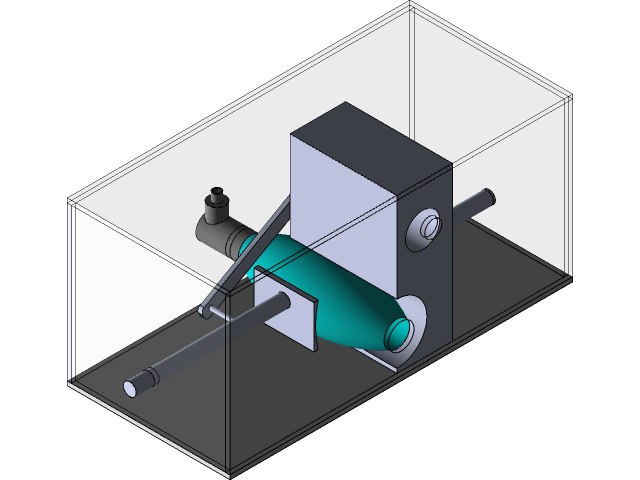
在此设计中,我从摩托车变速箱相互锁定的工作方式(尤其是脚踏启动机构)的工作中受到启发。因此,我开发了可在该应用程序中使用的版本。两个互锁齿轮啮合直到被拉开,简单地说,就是使用弹簧来提供返回力,以重新啮合带齿面齿轮。我的设计允许在360度左右的18个不同位置进行调节,而解锁刻痕面以允许旋转只需要0.13英寸的距离。带槽口的板允许横向枢轴运动(在水平面上旋转,**稍微倾斜但可以重新加工),另一个可以允许皮套上下枢轴旋转(在垂直平面上旋转)。用户所需要做的就是向下推.13英寸以松开槽口板,然后简单地旋转到位,重型复位弹簧使槽口板重新接合,所有东西都紧紧地固定在位,没有滑倒,没有行走的地方它就在这里,无需调整任何旋钮,也不必担心它们会松动。可以使用相同的步骤在垂直方向上上下旋转杆,只需握住支架的底座并拉出.13英寸,然后枢轴旋转,使其找到可以卡回原位的位置。搞定。
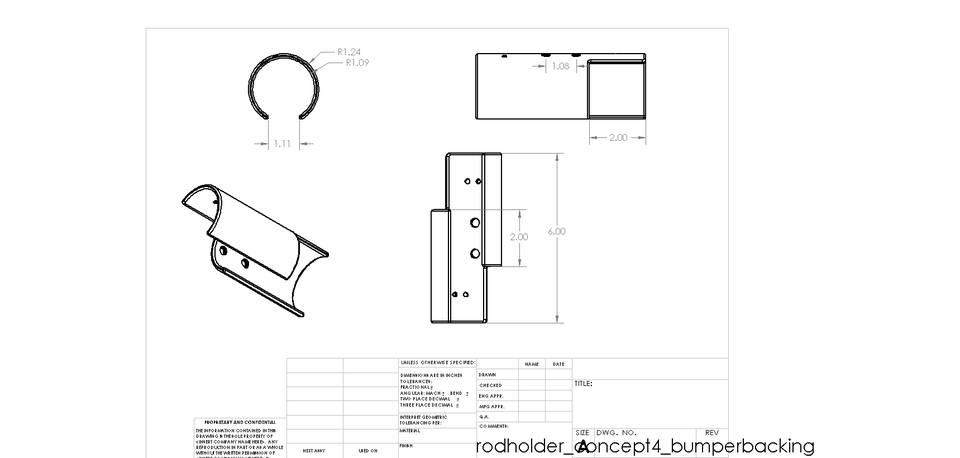
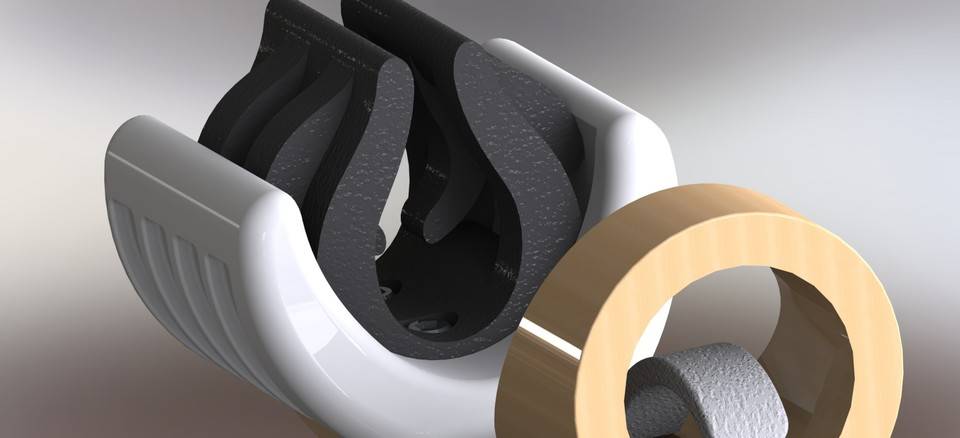
关于船用夹紧方法,再次着重于简化。只需简单地将两个带衬垫的爪子旋转约27度,即可将垫子滑到船底船架的下面,以确保所有物品都能紧紧固定。爪子由2个螺钉和定制的滑板固定,螺钉刚好紧紧地拧紧,因此可以将爪子旋转到打开和关闭位置。可能出现的唯一问题是,杆和杆固定器的旋转力会缓慢起作用,以重新打开夹具,需要进行原型测试,但如果是这种情况,只需添加一个小旋钮即可,另外拧紧爪子就足够了。 。
请查看随附的.pdf文件以及所需零件的完整列表和随附的BOM.excel,这是一个正在进行中的工作,但我收到了一些零件注塑成型的估算值。捕手,不要让复杂性吓到您,它实际上是一个非常简单的设计。这个想法是使大多数机械CNC由铝制成,而塑料和橡胶则由注塑成型,而木部件由CNC制成。我的粗略估算可能会使单位成本大约为50-100美元,但希望每单位成本低于50美元,而前期工具成本为50,000-80,000美元,但是BOM需要完全完成,只是一个超级球馆估算>>将随着我的估算而更新BOM。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250