 资源下载
资源下载




Quadcopter通用夹爪配件
文件列表(压缩包大小 46.22M)
免费
概述
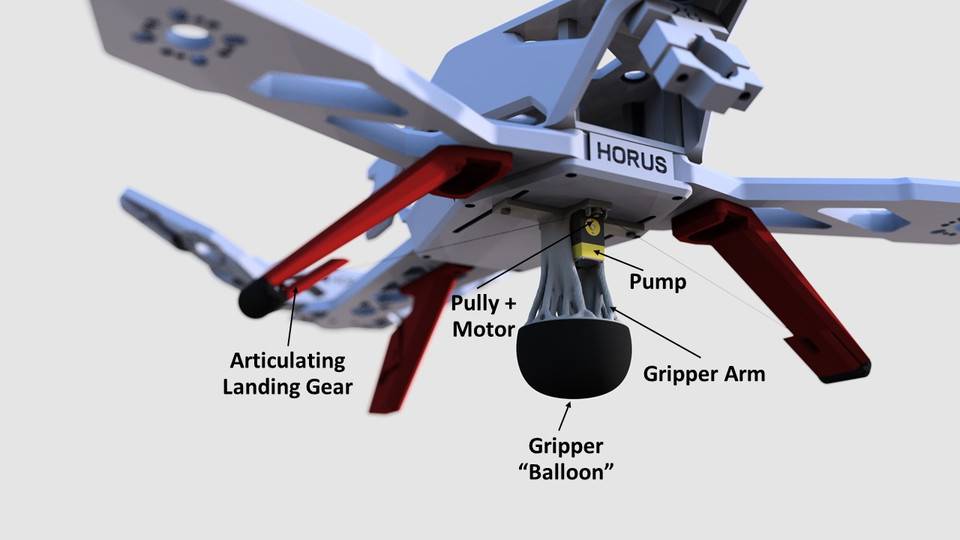
我的配件是通用抓手,其灵感来自康奈尔大学和美国芝加哥大学的项目: https://www.youtube.com/watch?v=0d4f8fEysf8 该设计还包括改进的起落架,该起落架具有收起脚(由电动机和作用在活动铰链上的两根电线提供动力),以使起落架在使用过程中不会与抓取器发生干扰。 设计用于在Objet打印机上进行打印。 在Autodesk Fusion 360中设计,并具有从Autodesk Project Dreamcatcher导入的几何图形。 Fusion对导入和操纵网格几何图形的强大支持是执行设计的关键。
per纸牙是填充有粒状材料的软气球形状。要拿起一个物体,四轴飞行器放低到该物体上,然后将其压入软橡胶中。夹臂底部的泵将空气从气球中吸出,使粒状材料变硬并将物体锁定在适当的位置。然后,四轴飞行器可以起飞并将其携带到所需位置,并通过释放真空来释放它。
使用这种设计,四轴飞行器可以轻松拾取各种物体。尽管这种通用性使其在众多应用中有用,但该无人机旨在用于危险条件和高高的建筑和维修。当工人放下工具时,无论工具的形状或着陆位置如何,无人机都可以快速安全地取回工具。这样可以节省时间,金钱,最重要的是可以节省生命。
该设计在每个组件中都充分利用了3D打印的优势。 1/2/3: 铰接式起落架使用Objet Connex的软探戈和硬vero材料制成带有活动铰链的多材料印刷品。通过使用Objet在印刷过程中“混合”树脂的能力,可以通过更改其Vero和探戈成分的百分比来将铰链的柔韧性调整为最佳刚度。 2/3: 在整个设计过程中,简化装配可降低制造成本。 3D打印具有制造滞留量,异常结构和多种材料的能力,被用于将泵的管道与grip纸牙臂,柔软的橡胶“气球”与手臂相结合,并将铰接端与起落架的底座相结合。通过组合这些零件,可以减少组装零件和工作量。另外,结构的完整性和设计的重量都通过去除接头而得到改善。 1/2: Autodesk的Project Dreamcatcher是用于拓扑优化的生成设计工具,用于创建抓取器臂的分支结构。该设计尽可能减轻了重量和材料,同时确保零件足够坚硬以承受合理的载荷。有机分支设计比传统方法可制造的等效设计轻得多。 1/2: 通用抓手中通常使用的粒状材料是咖啡渣。对于此设计,使用Objet打印小颗粒。借助3D打印,可以控制颗粒的微观结构以及硬和软材料的成分,以创造最佳特性并改善传统使用的咖啡渣的性能。
3D打印的强大功能并没有实现可打印性,而是超越了可打印性,并创建了真正受益于增材制造优势的设计。使用通用夹具,我创造了一种实用而有影响力的设计,同时真正受益于3D打印和优于传统的可制造设计的出色表现
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250





