 资源下载
资源下载

魏斯联合
文件列表(压缩包大小 15.83M)
免费
概述
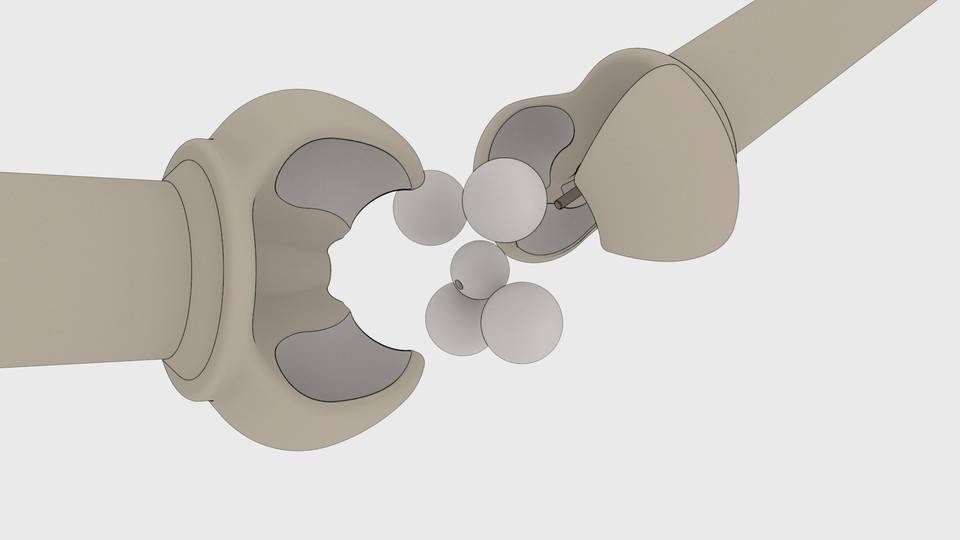
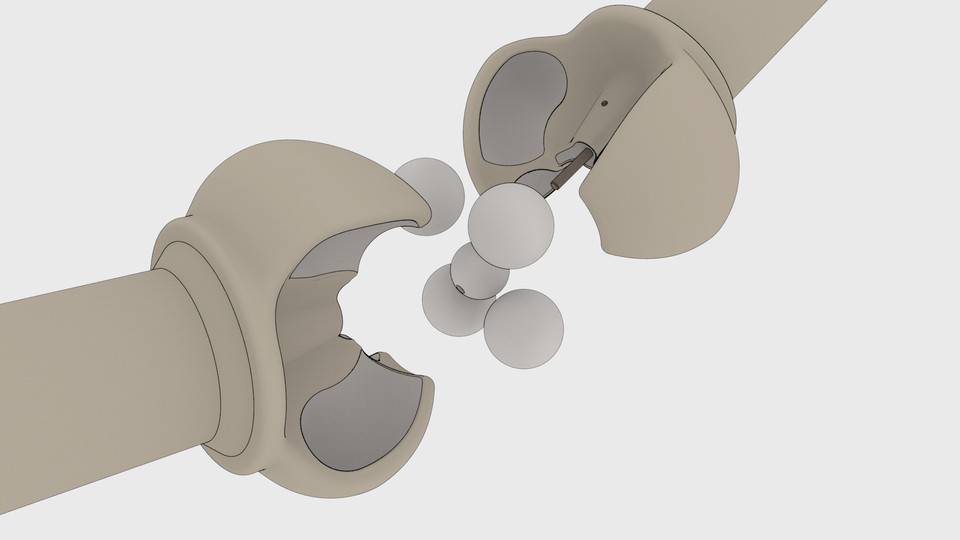
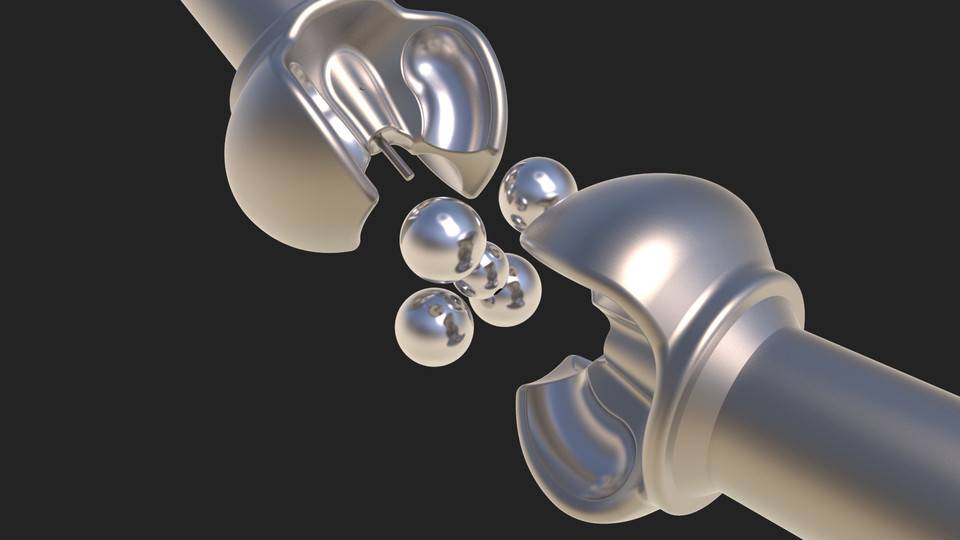
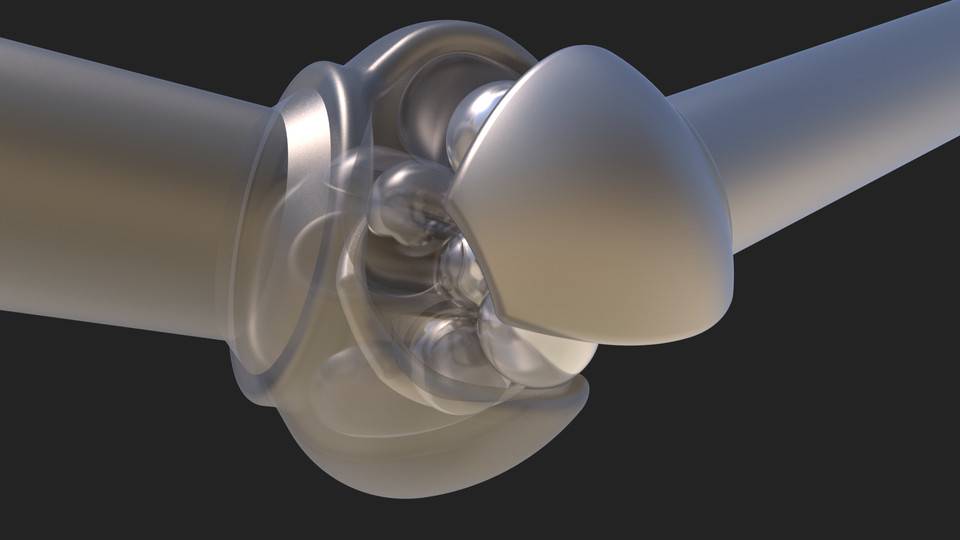
-魏斯接头由两个相同的磁轭组成,两个磁轭由四个球肯定地定位。两个磁轭通过一个球居中,球中间有一个孔。圆形轨道中的两个滚珠传递扭矩,而其他两个则对关节进行预加载,并确保在加载方向发生变化时不会产生反冲。它的结构与Rzeppa的结构不同,因为滚珠是紧靠联轴器两半之间的紧密配合,并且不使用任何保持架。中心球在插入外圈的销上旋转,并用作其他四个球的锁定介质。当两个轴都成一直线时,即成180度角时,滚珠位于与轴成90度的平面上。如果驱动轴保持在原始位置,则从动轴的任何移动都将导致滚珠移动一半角度距离。例如,当从动轴移动30度角时,两个轴之间的角度减小到150度。滚珠将沿相同方向移动15度,并且驱动轴与滚珠所在平面之间的角度将减小为75度。该动作满足了滚珠位于将驱动角二等分的平面中的要求。 -尺寸为近似值,应仅用于演示目的。 -可以在此处查看更高质量的动画:http://imgur.com/a/SNhzk
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250






