资源下载
资源下载








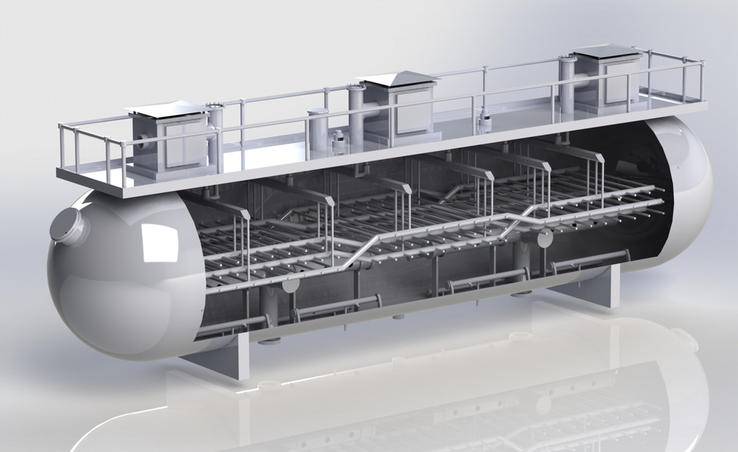
[REGOLITH REAPER] NASA月球采样系统
文件列表(压缩包大小 23.87M)
免费
概述
总重量: -460g包括regolith容器 -416g(不含regolith容器)
一切都从以下机器加工而成: -6061铝 -钢 -钛(桶齿)
能量消耗: -振动模块约为5-10 W -每个光学灰泥液位传感器消耗的功率约为1W或更小
总功耗(最坏情况):15 W
整个挖掘铲斗通过斗杆安装板连接到流动站斗杆。 视觉检查托盘磁性支腿支架,摄像机校准目标和粉煤灰容器安装在流动站主框架上。
[]括号中的数字与渲染编号相对应。
对重碎石进行分类的整个过程按以下步骤进行: -挖掘碎屑直到发现感兴趣的层
-[1] [1]首先,将一块白铁矿样本带入“挖斗”中 -[1] [2]然后必须将整个物体翻转180度。相对于地面(倒置) -[1] [2]振动马达开启 -[1] [2]然后,我们需要等待排序过程完成。 -[1] [3]在下一步中,需要将铲斗向其侧面旋转45度或更多角度(碎屑必须落入出口通道中) -[1]应当重复整个过程,直到两个出口通道中充满了已分类的物料(粉煤灰液位传感器将指示该情况)
-[2]然后,从第一出口通道将分选出的粗骨料[直径1-2厘米]弹出到目视检查托盘中,该检查托盘目前已固定在流动站框架上 -[2]下一步,应使用流动桅杆摄像机/臂摄像机对样品进行目视检查 -如果样品一切正常,则: -[3/4]目视检查托盘从流动站抬起 -[5]然后,将碎石从检查托盘放到碎石容器中(例如,高1cm的层) -下一步,应将剩余的食物扔出检查托盘
-重复整个过程,用小于[1cm直径]的硬水石在硬水石容器中形成另一个1cm的层
---需要重复上述所有操作,直到粉煤灰容器液位传感器报告其已满。
光学灰泥液位传感器基于IR接近传感器。
此致, 安德烈·拉切夫斯基(Andrzej Laczewski)
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250