资源下载
资源下载

基于深度强化学习的未知环境自主探索方法

文件列表(压缩包大小 210.73M)
免费
概述
决策模块
目录
- 功能介绍
- 效果展示
- 配置及环境要求
- 编译及安装方式
- 软硬件系统框图
- 原理介绍与理论支持分析
- 软件架构与层级图
- 开源协议
- 设计模式
- 鸣谢
功能介绍
决策模块是完成RoboMaster AI Challenge任务的重要智能控制单元。其主要负责从感知层获取的原始场上信息,经过预处理后,得到敌我双方机器人状态、血量、位置等信息,并通过处理后的信息作出合适的决策行为。 在感知系统完成的基础上,决策组的工作重点集中在决策层系统部署以及仿真训练环境搭建。针对RoboMaster AI Challenge中典型的2v2自主机器人对战方式,本项目将2v2对战视为零和博弈问题,并使用多智能体深度强化学习和行为决策树两种方式设计决策器。同时,为了结合规则型决策和学习型决策两种方式的优劣,并将大量的环境交互数据网络优化的结果运用于实车决策,本项目构造了三种仿真环境实现对算法的验证开发。分别是用于模型验证的Gazebo环境,策略训练的星际环境以及端到端控制训练的PyGame环境。
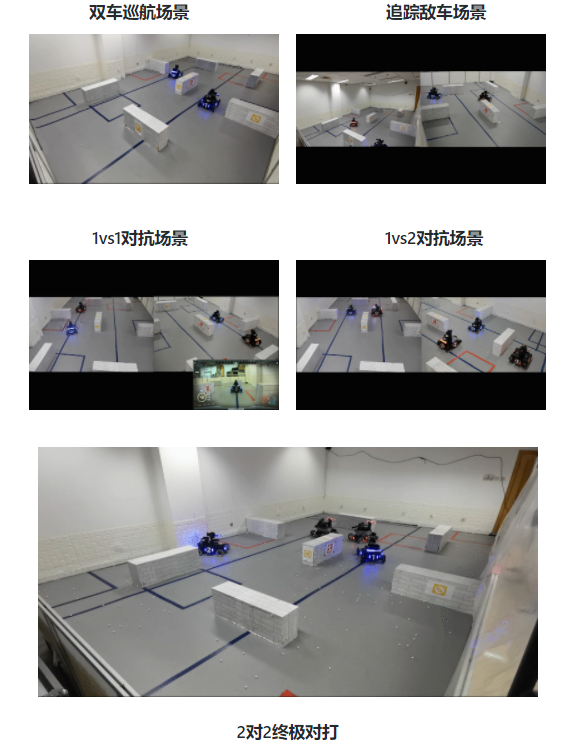
效果展示
真平台场景

实车场景
配置及环境要求
操作系统配置
所有步兵机器人均配备NVIDIA JETSON XAVIER嵌入式高性能计算单元作为车载电脑。
- CPU框架:ARMv8
- GPU计算能力:32TFLOPS
- 操作系统:JETPACK 4.2.2 (ARM框架下Ubuntu18.04以及GPU所需的软件包)
软件环境要求
- Ubuntu 18.04 / 16.04
- CUDA 10.0 + cuDNN 7.3.1
- TensorRT 5.0.3
- OpenCV 3.3.1
- Pytorch c++ 1.1.0 + Torchvision 0.3.0
- ROS Kinetic(Ubuntu 16.04)及其依赖包
编译/安装/运行方式
配置及安装Pytorch C++
为了提升决策模块在实体步兵机器人上的实时性能,学习型策略得到的模型需要在pytorch c++环境中部署,因此需要在车载计算单元上手动编译安装pytorch。
#新建工作空间
mkdir robo_ws
cd robo_ws
#复制pytorch源码到本地并进入,需要指定pytorch依赖库
git clone -b v1.1.0 https://github.com/pytorch/pytorch.git
cd pytorch
#更新依赖模块
git submodule sync
git submodule update --init --recursive
#更改CMakeLists.txt中的以下参数,决定安装的模块
BUILD_TORCH -> ON
BUILD_BINARY -> ON
BUILD_PYTHON -> OFF
#编译文件
mkdir build
cd build
cmake ..
make -j8
sudo make install
编译决策模块
#复制本项目到本地
git clone git@github.com:DRL-CASIA/Decision.git
#进入仓库文件夹中的ros工作空间
cd Decision/RoboRTS_decision/
#更改神经网络参数导入路径
sudo gedit src/roborts_decision/example_behavior/nn_behavior.h
#将torch::jit::load中的文件路径替换为本地weights/agent_model.pt路径
#完全编译
catkin_make
#之后也可对package进行单独编译
catkin_make --pkg roborts_decision -j8
#如果遇到protobuf和pytorch相关问题,需要到pytorch官网或其Github下载并解压libtorch包(v1.1.0),将libtorch中的文件放在pytorch文件夹中即可。
unzip -cftu libtorch.zip -d libtorch
mv -r ./libtorch ./pytorch
运行编译完成模块指令
##单车决策测试------
#运行启动节点
roslaunch roborts_bringup roborts.launch
#运行决策节点
rosrun roborts_decision decision_node
##双车决策测试------
#运行所有启动节点
roslaunch roborts_bringup multi_stage.launch
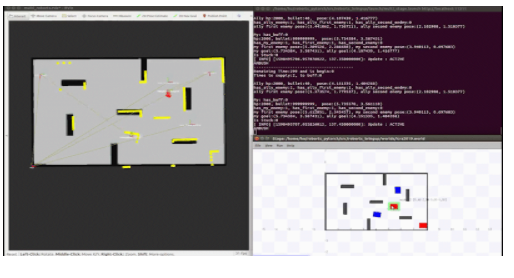
多车仿真运行效果
文件目录说明
roborts_decision
├── behavior_tree #决策行为树
│ ├── behavior_node.h #行为树节点类定义
│ ├── behavior_state.h #行为树状态定义
│ └── behavior_tree.h #行为树运行类定义
├── blackboard
│ ├── blackboard.h #黑板定义(决策框架的输入)
│ └── communication.h #通信定义(用于友军间通讯)
├── blue_master.cpp
├── blue_wing.cpp
├── cmake-build-debug
├── CMakeLists.txt
├── cmake_module
├── config #四辆车单独配置文件
│ ├── blue_master.prototxt
│ ├── blue_wing.prototxt
│ ├── decision.prototxt
│ ├── red_master.prototxt
│ └── red_wing.prototxt
├── decision_node.cpp
├── example_behavior #行为模板
│ ├── ambush_behavior.h #埋伏,站桩输出
│ ├── attack_behavior.h #支援,前往攻击
│ ├── back_boot_area_behavior.h #返回基地
│ ├── chase_behavior.h #追击
│ ├── escape_behavior.h #撤退
│ ├── goal_behavior.h #指定目标导航
│ ├── nn_behavior.h #神经网络决策
│ ├── line_iterator.h #直线路径判断迭代器
│ ├── patrol_behavior.h #内环巡逻
│ ├── reload_behavior.h #外环巡逻
│ ├── search_behavior.h #在敌方消失区域进行搜索
│ ├── shield_behavior.h #前往装甲buff区
│ └── test_behavior.h #测试,用于新功能开发
├── executor
│ ├── chassis_executor.cpp
│ ├── chassis_executor.h #底盘任务调度类定义
│ ├── gimbal_executor.cpp
│ └── gimbal_executor.h #任务调度类定义
├── package.xml
├── proto
│ ├── decision.pb.cc
│ ├── decision.pb.h
│ └── decision.proto #策略层参数配置
├── red_master.cpp
├── red_wing.cpp
└── sel_behavior_node.cpp
系统框图
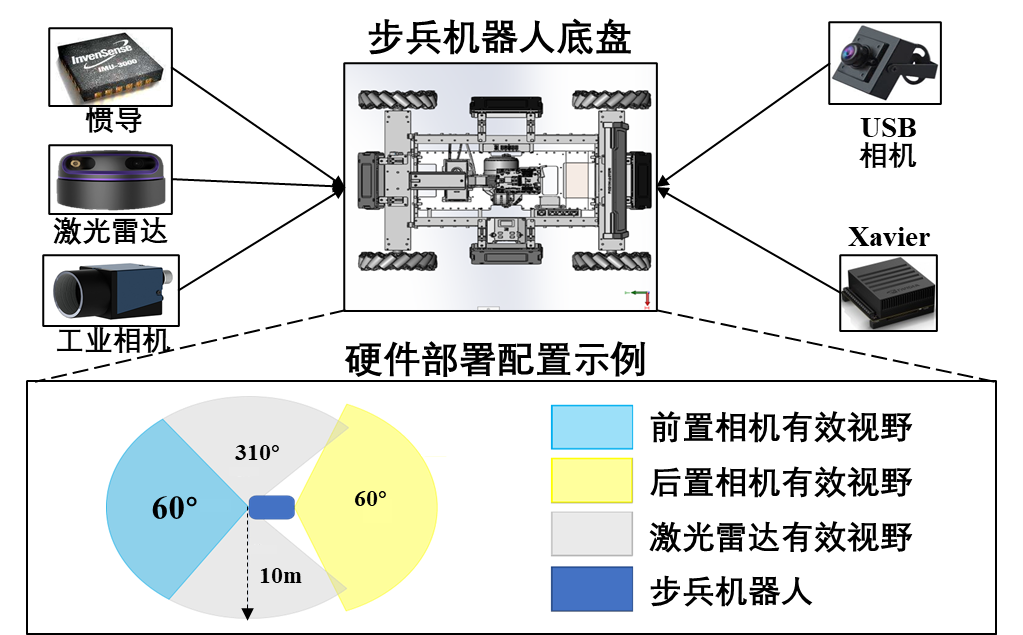
硬件部分
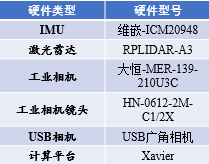
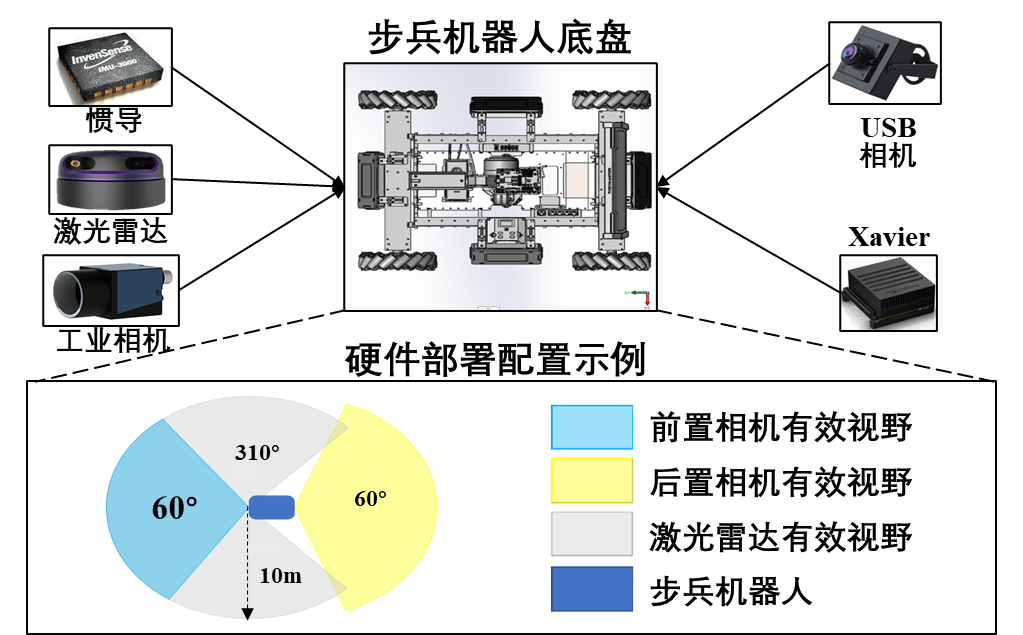
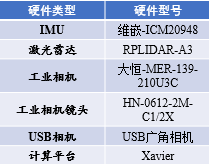
步兵机器人的硬件系统除了自带的底盘和云盘系统以外,为了实现机器人的定位,检测和自主移动等功能,需要在机器人主题上加装各种外围传感器。在传感器选型时需要注意传感器的尺寸,重量,合适的安装位置,开发难度等。在当前版本的机器人系统中,我们配备了工业相机,激光雷达,后置USB相机,为步兵机器人提供合理有效的视野范围。传感器选型及硬件部署如下
传感器型号
 传感器部署图
传感器部署图
软件部分
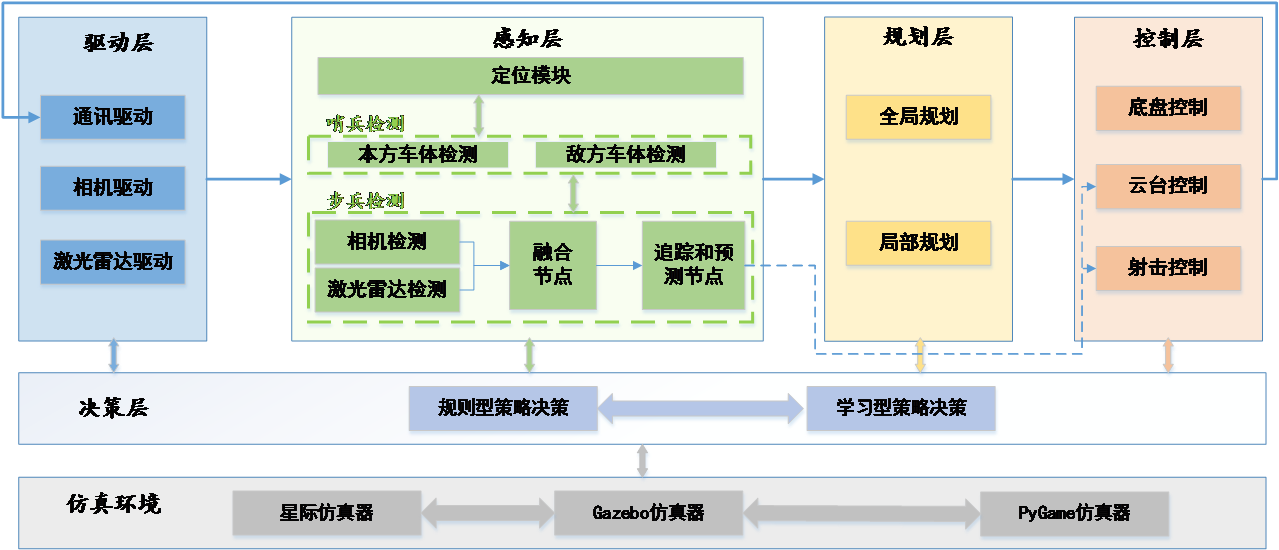
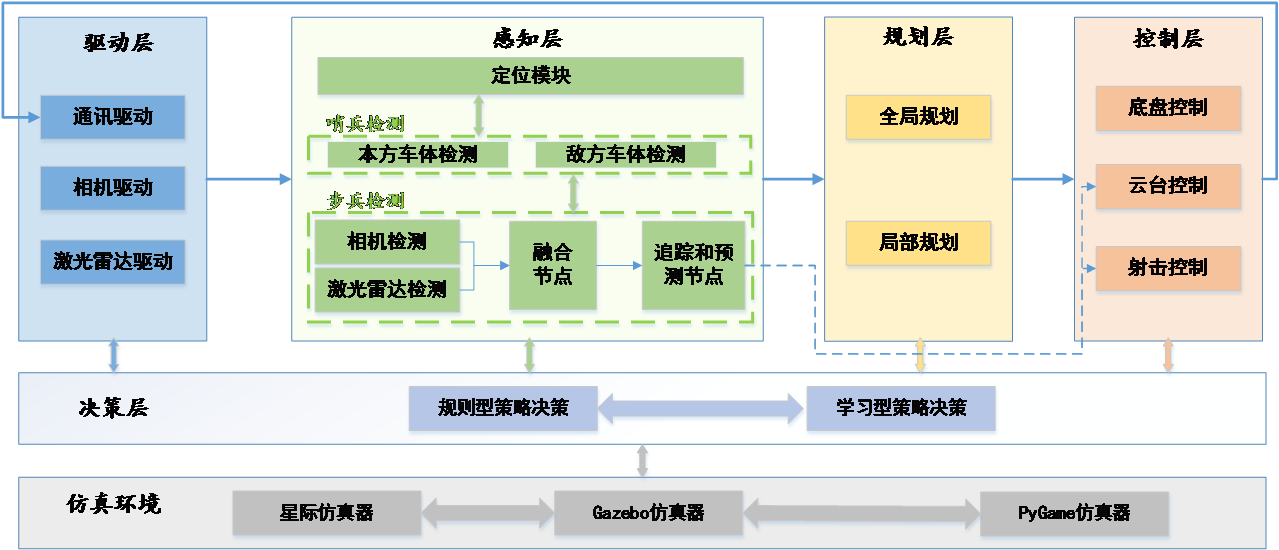
整车的软件架构如下图所示,决策模块接受底层驱动/感知/规划/控制层信息,通过规则型(决策树)和学习型(多智能体深度强化学习)两种策略方式决定步兵机器人下一步动作。除决策系统部署外,决策组还承担仿真训练环境的搭建任务。
软件系统框图
仿真平台部分
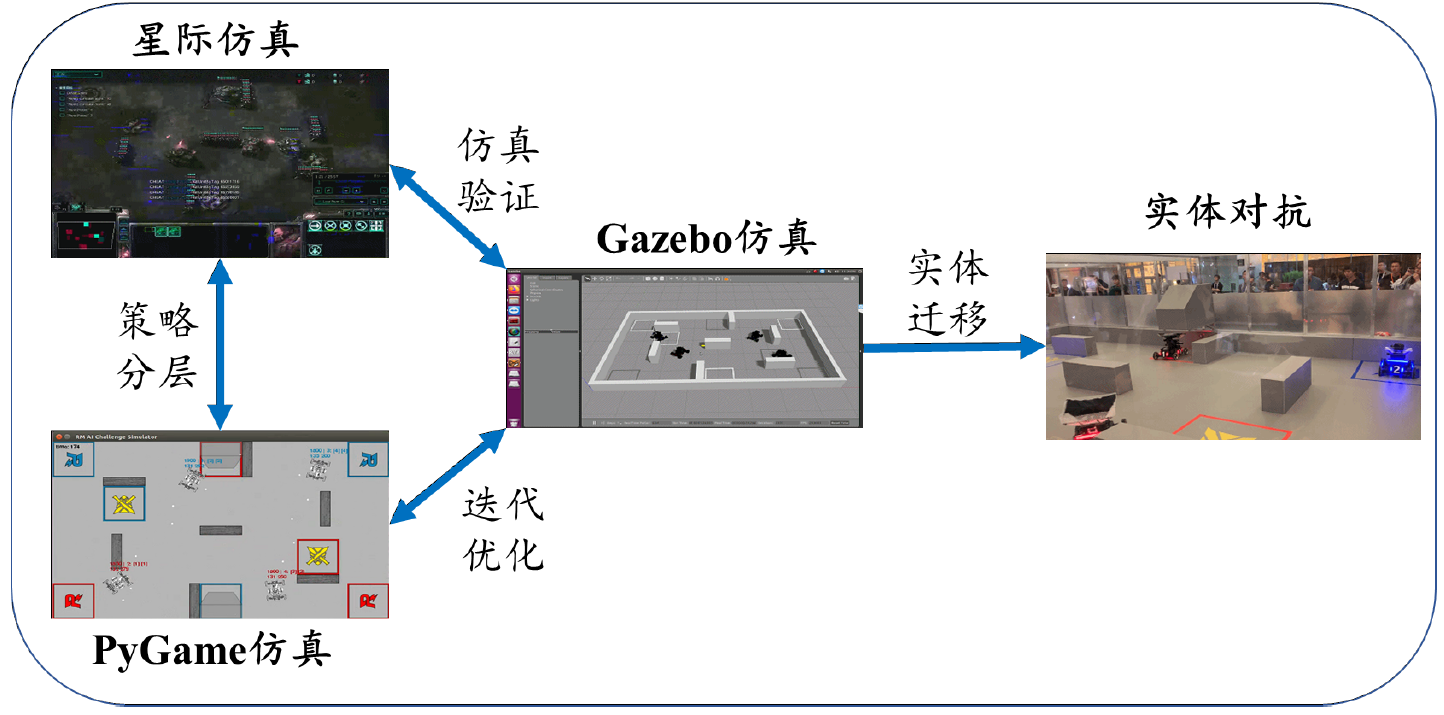
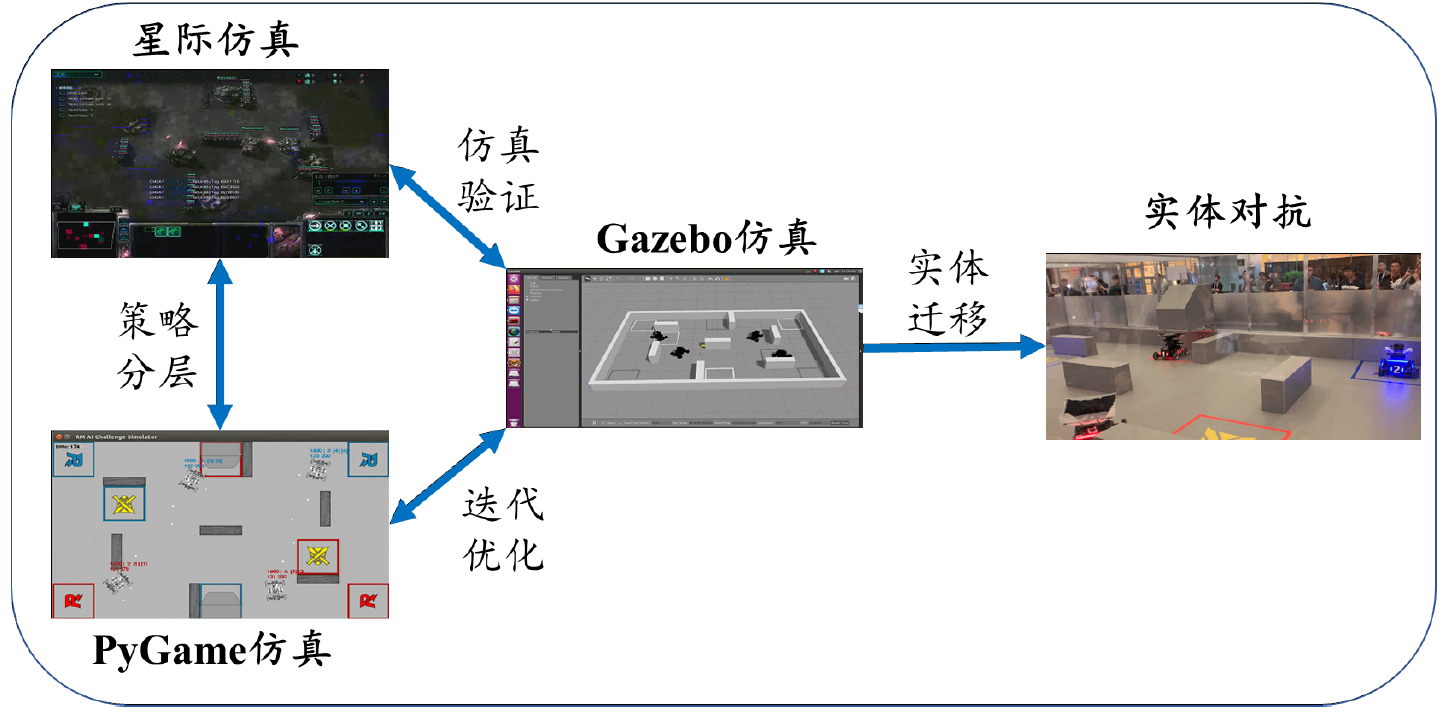
对于学习型决策算法,通常需要大量的数据资源作为训练基础,同时需要反复迭代优化神经网络性能,因此需要构建仿真模拟器实现复杂的对抗场景,并基于复现场景优化决策模块。同时,在实车测试之前,决策系统的输出结果需要在仿真系统中进行测试并验证。我们构造了三种仿真环境以满足不同的实验需求,分别是用于模型验证的Gazebo环境,策略训练的星际环境以及端到端控制训练的PyGame环境。仿真平台及关系如下图所示。
原理介绍与理论支持分析
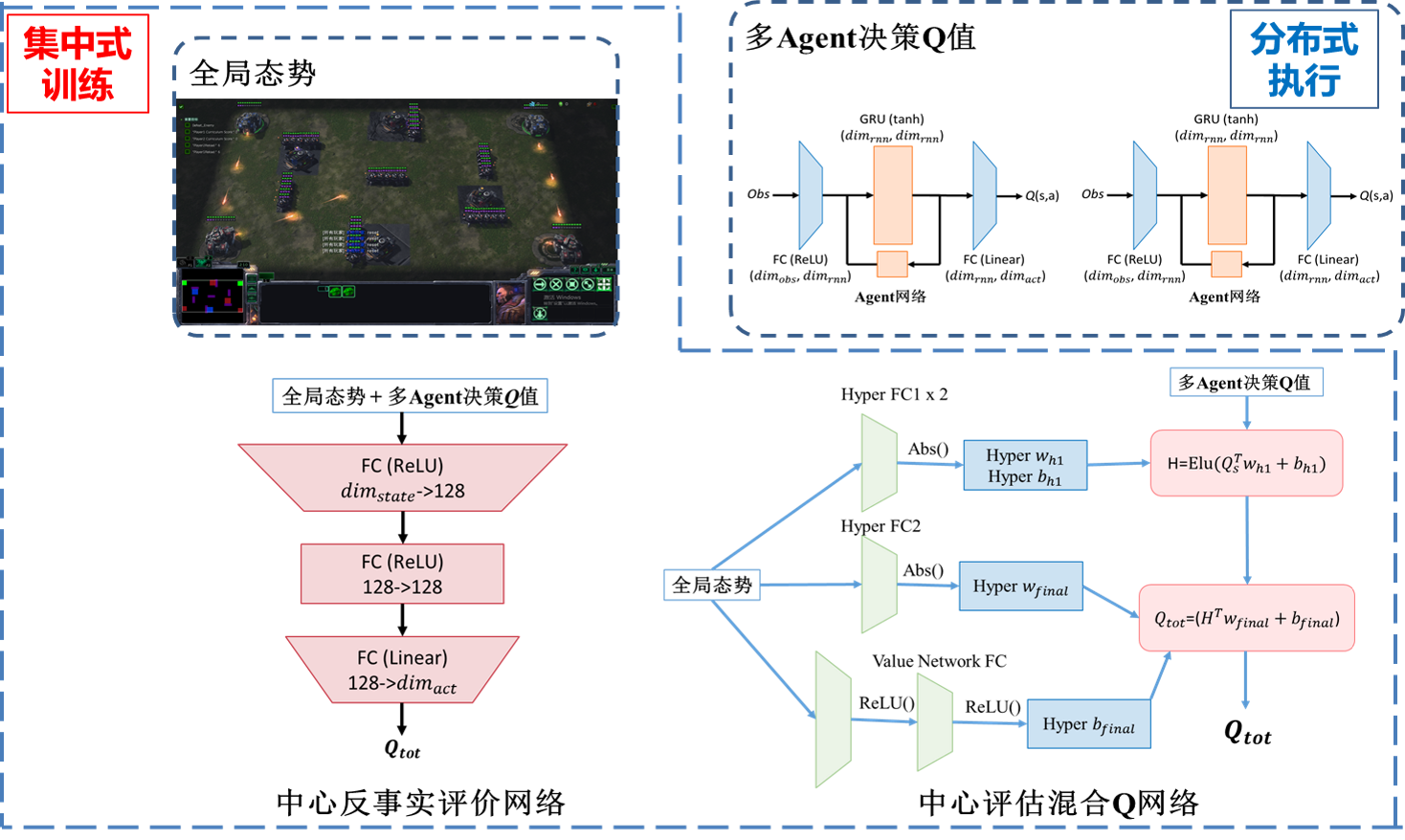
多智能体深度强化学习
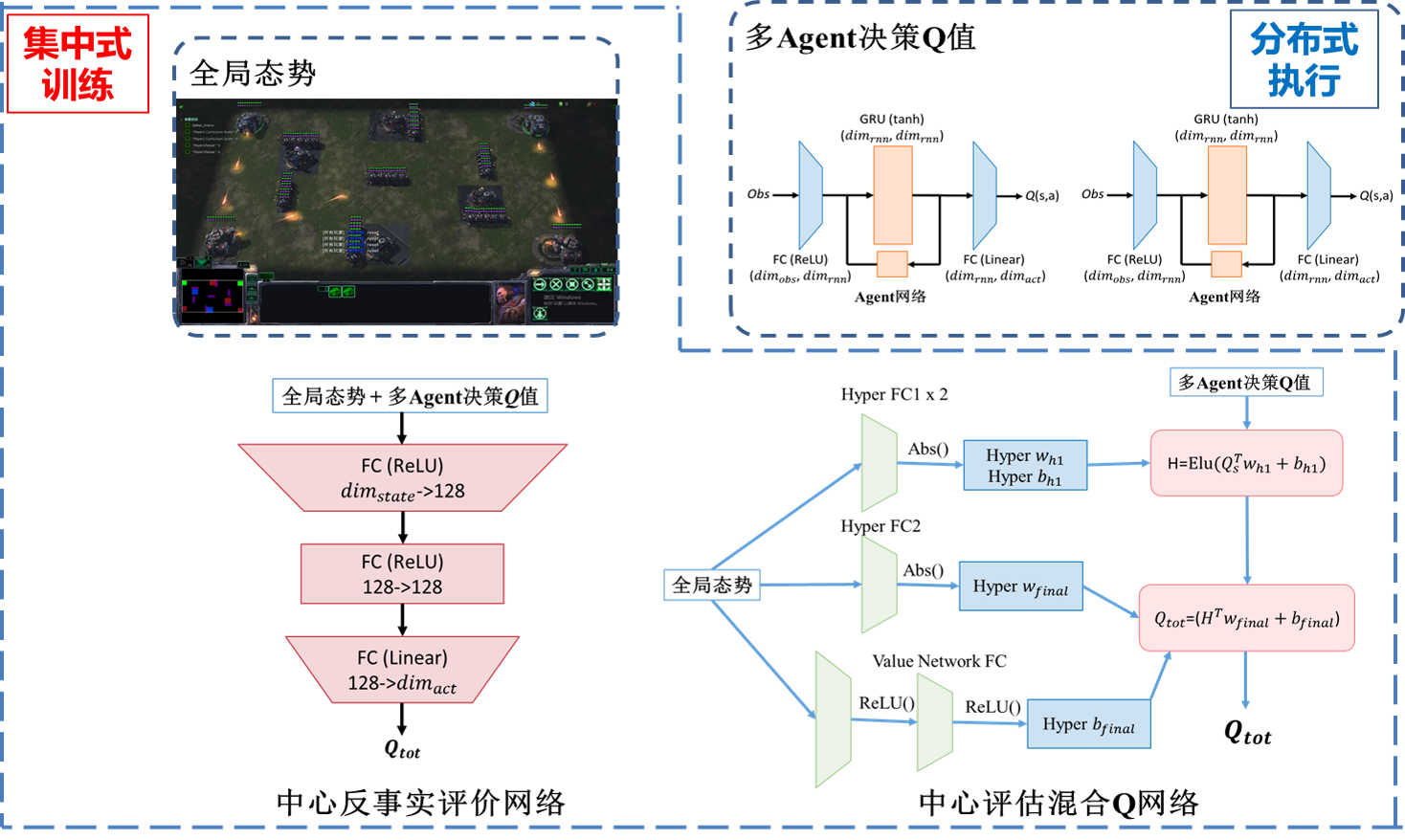
学习型策略采用多智能体深度强化学习方法。采取与系统内置AI作战的对抗训练方式,经过混合迭代中心反事实评估网络和中心评估混合Q网络方法,对全局态势进行估计,根据胜负奖赏与血量差等奖赏信号,优化多智能体网络,优化策略决策,使策略系统自适应RoboMaster对抗环境。
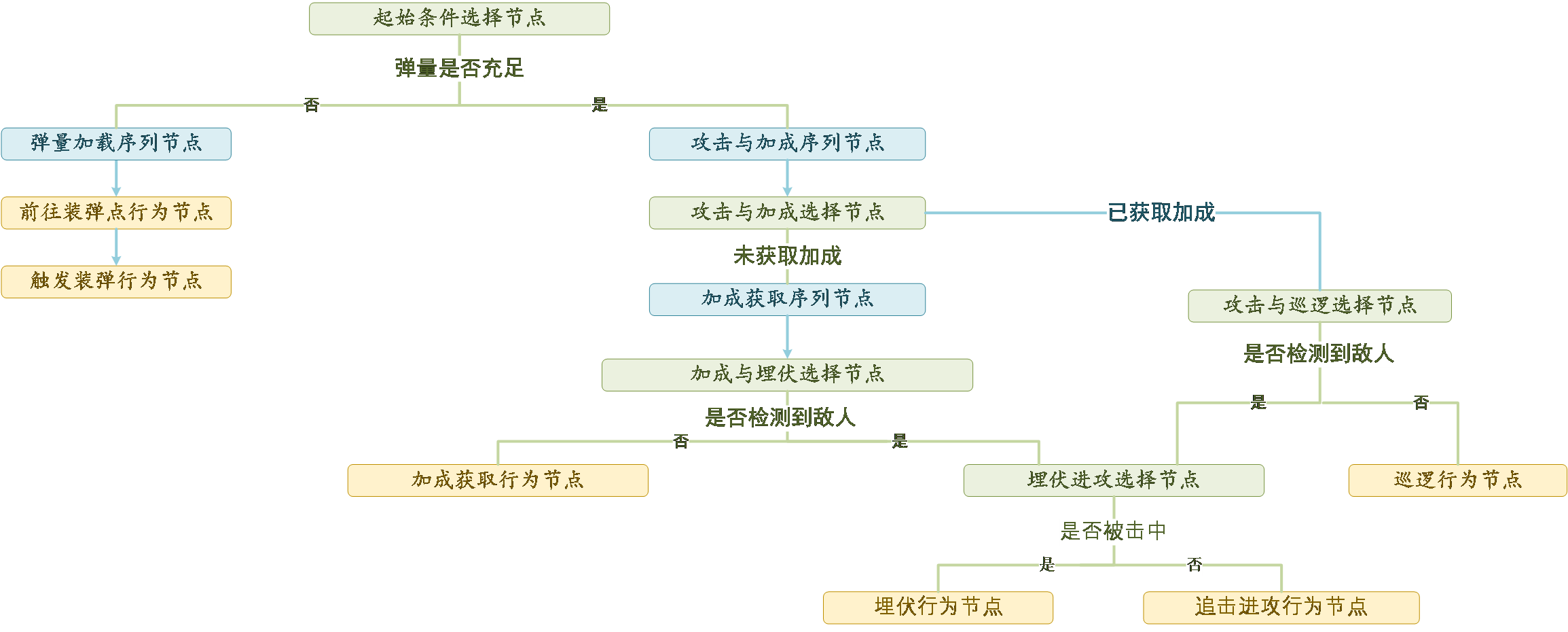
行为决策树
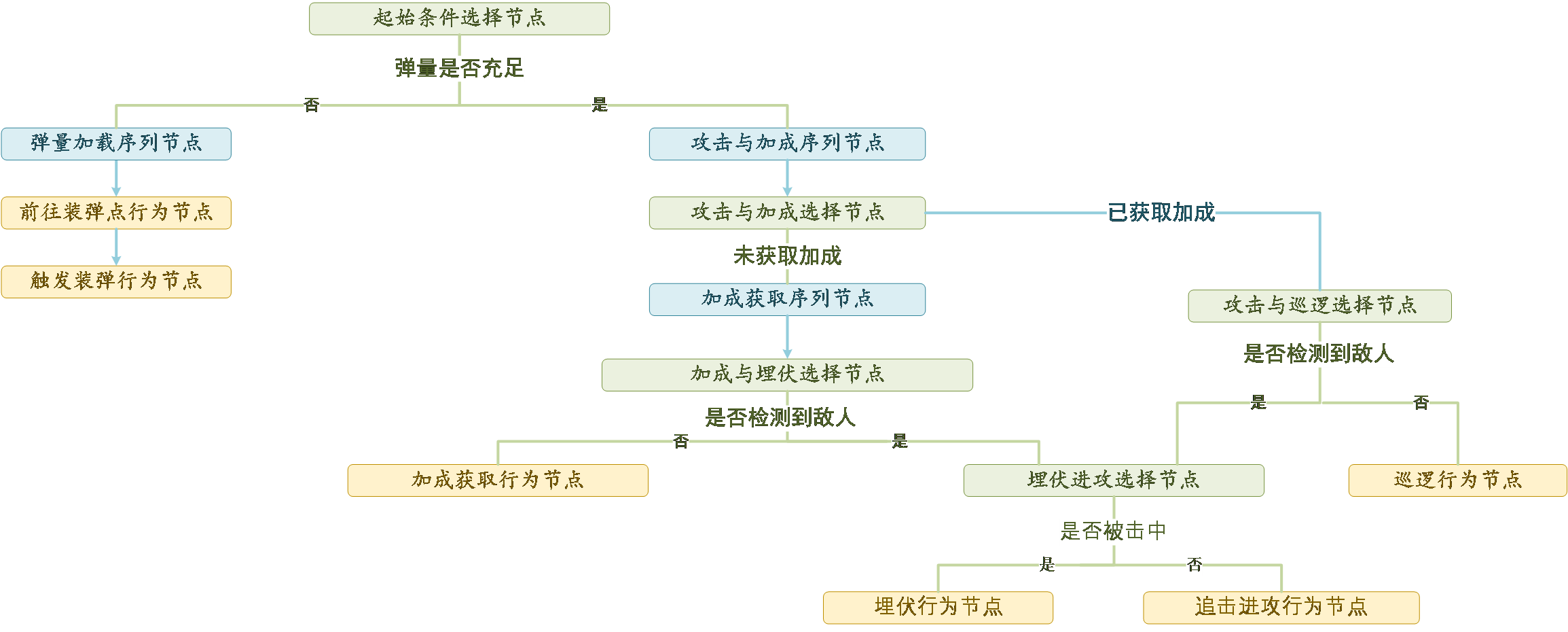
行为树作为典型的规则型决策算法,已在游戏领域得到广泛应用。这里我们通过定义选择节点、序列节点、并行节点和行为节点来实现追踪、射击、补弹、占领buff等作战决策行为。决策逻辑如下:
软件架构与层级图
决策任务
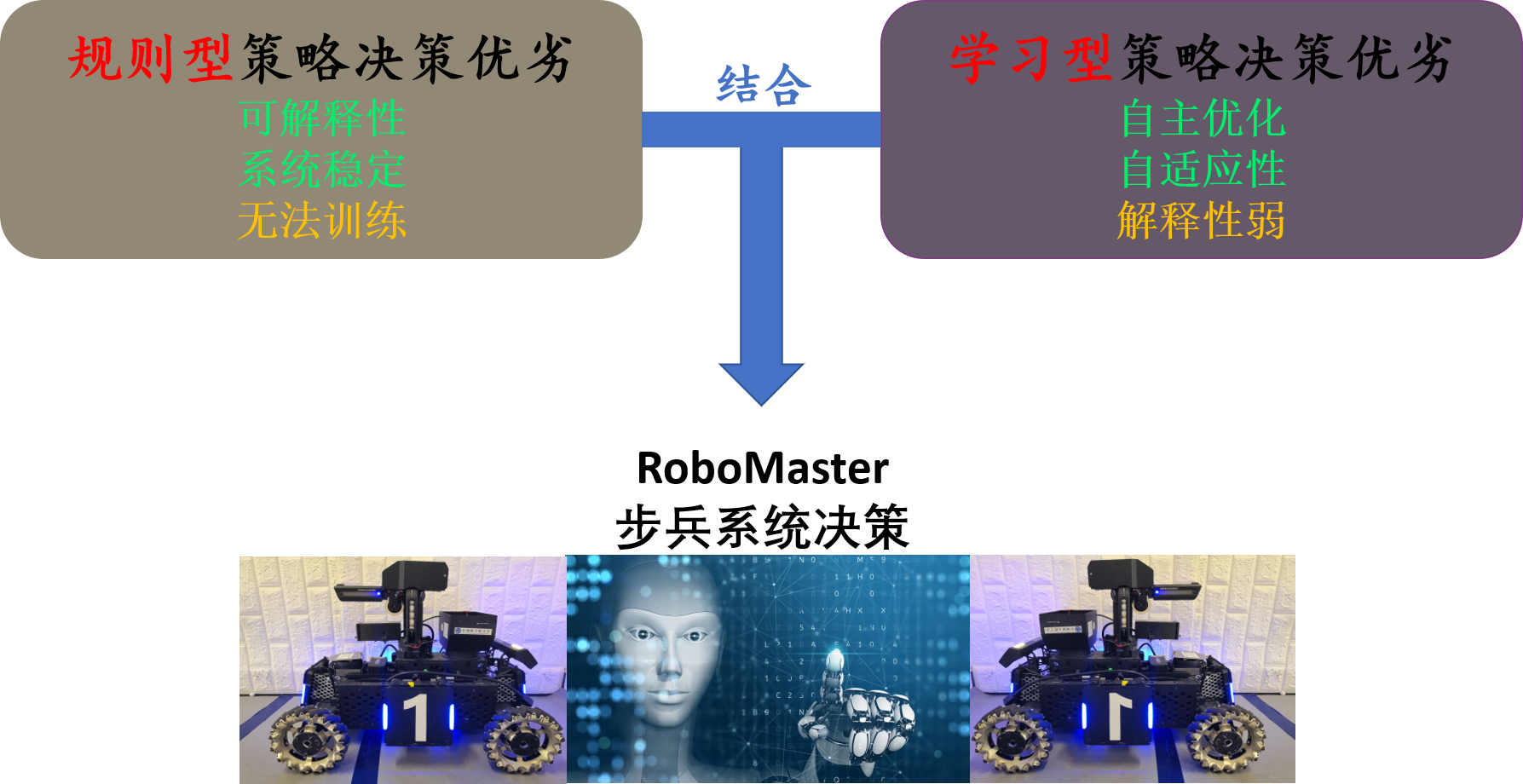
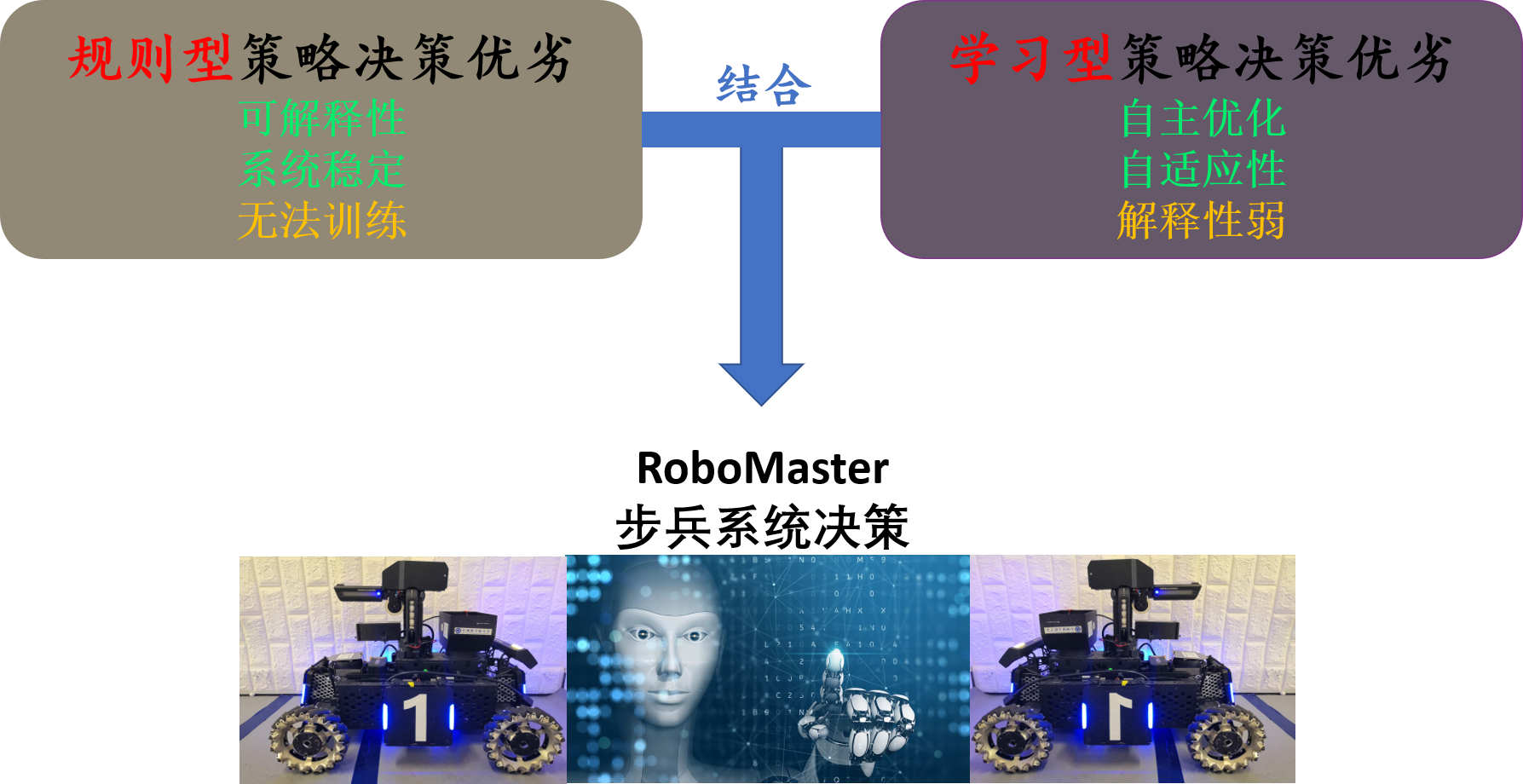
总体而言,规则型决策具有系统可解释性且表现性能较为稳定,但无法作自学习持续优化完善;学习型决策具有自主进化的能力,可自适应系统环境,但一般需要较长的训练优化时间和较多的计算资源,缺乏可解释性且稳定性较弱。为了将规则型和学习型算法有机结合,我们通过学习型算法使机器人在RoboMaster对抗环境下作探索,并与系统内置脚本AI作对抗,找到有效攻击策略。然后通过规则组合的方式,使机器人作出近似决策行为,完善决策系统功能。这样既增强系统的可解释性和稳定性,并强化了多机器人协作表现性能。
开源协议
本项目签署了MIT 授权许可,详情请参阅 LICENSE.txt
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250