 资源下载
资源下载

像玩具一样的波士顿动力机器人狗
文件列表(压缩包大小 9.13M)
免费
概述
随着3D打印技术的进步,我们正处于极限重新设计的阶段。这个阶段极大地影响了我们教孩子的方式。有新的教学方法在主导原始方法。这些教学方法之一是通过新颖和创新的玩具。这些玩具使我们的孩子可以洞悉事物的运作方式,并帮助他们构造自己的玩具。我的目的是帮助孩子们了解齿轮的基本原理。因为齿轮是我们大多数人所需要的,从飞机发动机到坦克机械化履带,齿轮是推动世界上大多数技术运转的燃料。
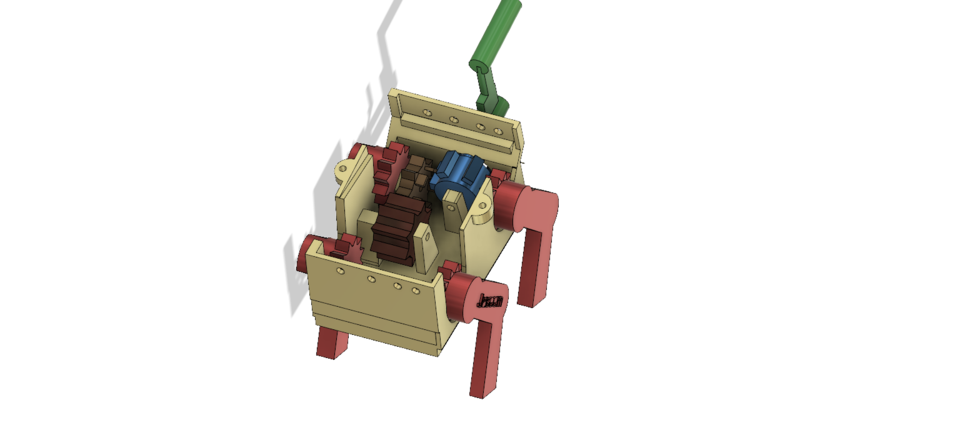
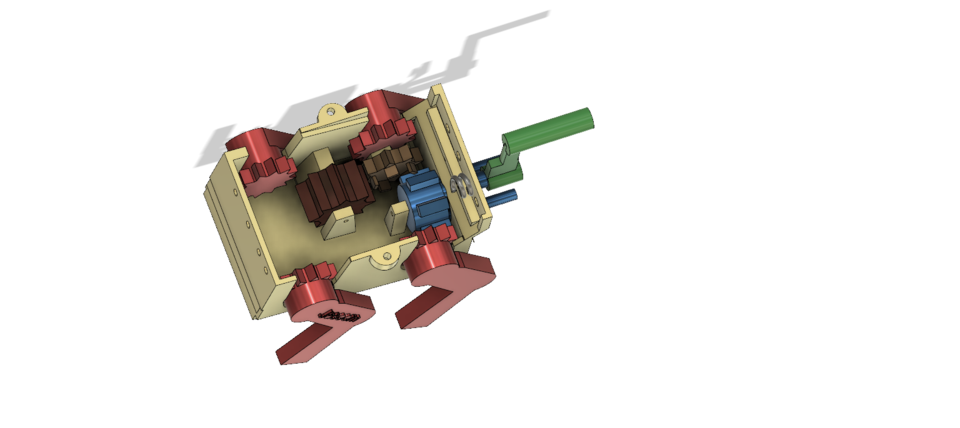
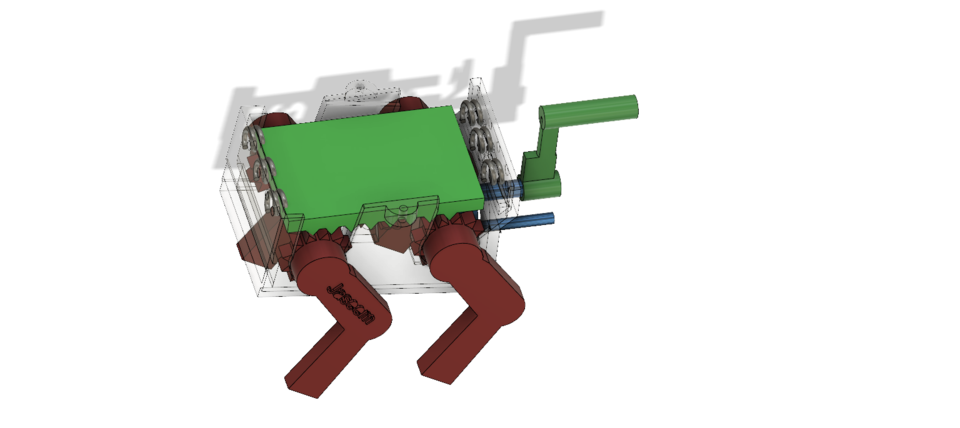
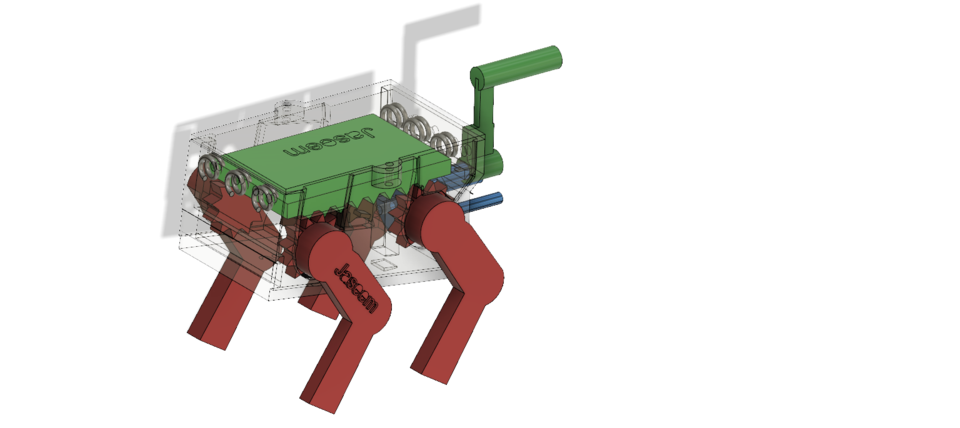
作为机械工程师,我设计了“像玩具一样的波士顿动态机器人狗”。此设计的灵感来自波士顿动态机器人。通过旋转钥匙,它的腿向前和向后移动。玩具的主体应采用透明材料(参见材料)印刷,内部零件应采用PLA或ABS彩色材料印刷。通过这样做,可以清楚地看到腿如何向前和向后移动,并了解基本的力学原理。孩子们将了解加入一些齿轮如何构成一个完整的工作系统。
所用材料: Mainbody1文件=透明ABS或PLA 上身主文件=透明ABS或PLA 其余零件可以是任何所需颜色的ABS或PLA。
注意:弹簧的直径为0.3英寸。您可以从任何五金店以1美元的价格购买它们,并用螺丝将其固定。除此之外,弹簧都是3D打印的,构造后,玩具的大小将准确无误。 120.65 x 120.65 x 120.65毫米(4.75 x 4.75 x 4.75英寸)我还添加了图片来解释玩具的组装和工作。最后一件事,请使用0.2微米螺钉将齿轮固定在主体上。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250





