资源下载
资源下载

稳定腿***更新***
文件列表(压缩包大小 17.84M)
免费
概述
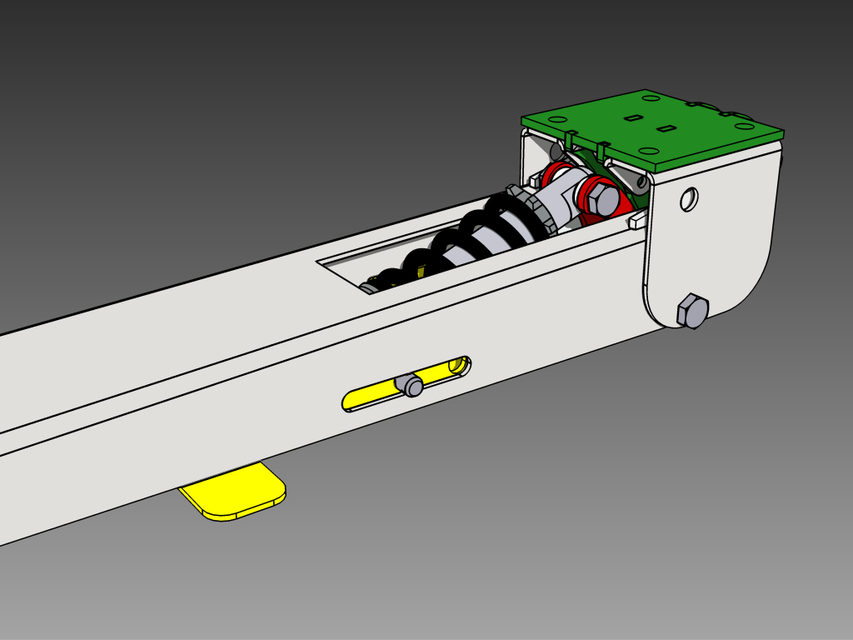
起初,我设计了一个弹簧替代品,利用一个密闭的橡胶压缩锥体作为原始悬挂部件的直接替代品。不幸的是,小尺寸的最大压缩力约为 5000 磅,当我增加组件的尺寸时(这需要重新设计主悬挂臂以清除)铰链点安装失败。
因此,我采取了不同的方法 - 而不是快速修复_以正确的方式做。 这个概念还有一个设计师没有注意到的额外缺陷:“Haulz-All”作为一种多功能负载牵引解决方案销售,悬挂后轮是主要特征。然而,在半负荷下,弹簧刚度将远远超出允许悬架行程,使其完全脊状(在这种情况下,这是一个非常无意义的练习,他们可能会坚持使用更便宜的脊状后悬架)。
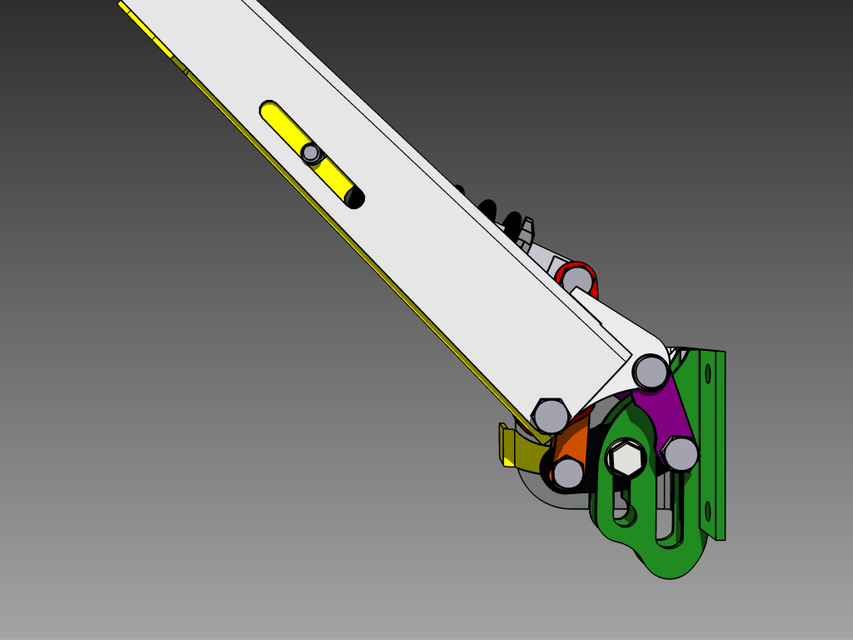
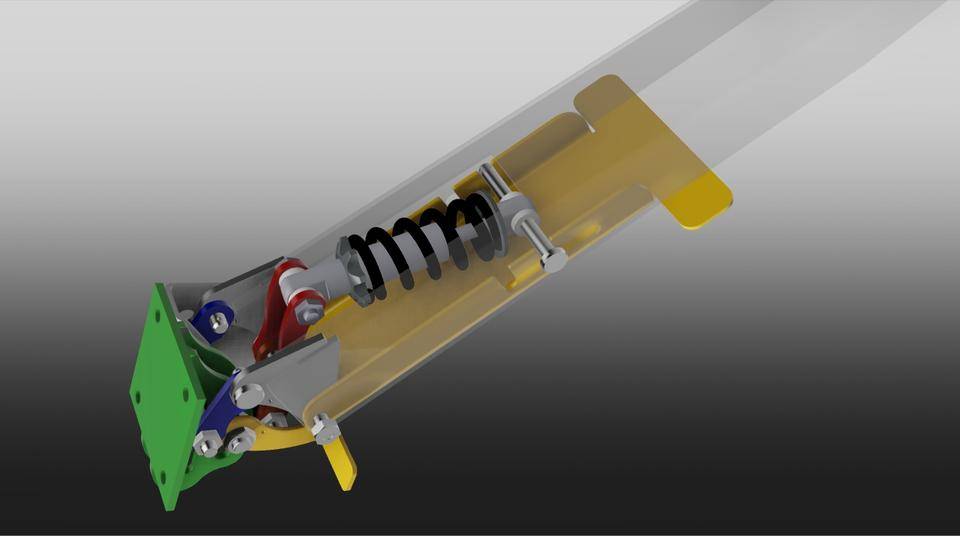
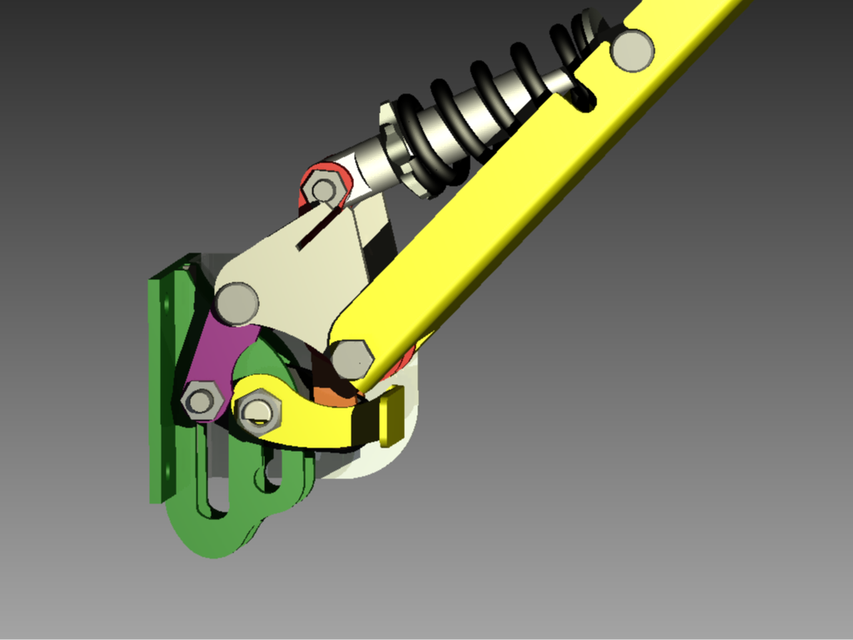
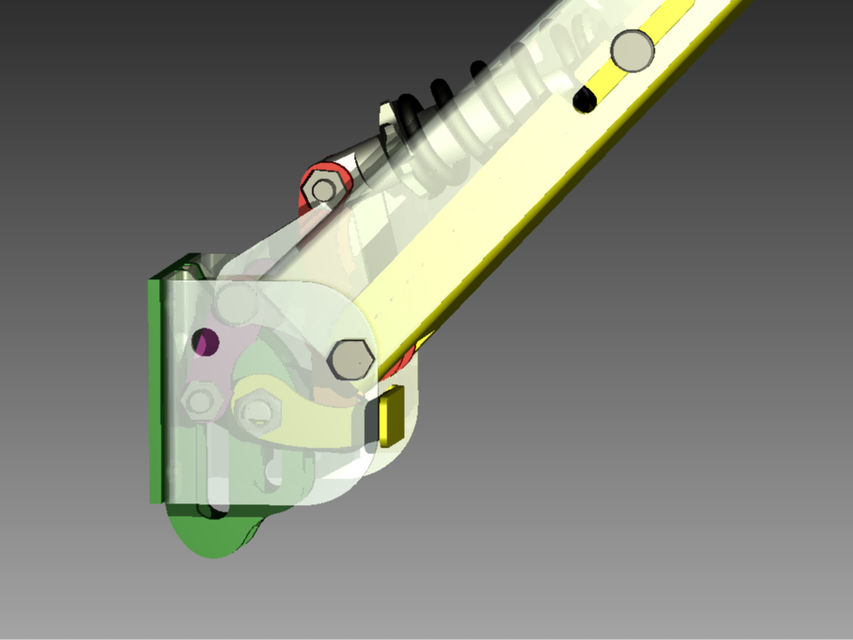
我的设计利用了一个离型链来减少施加在弹簧上的力,同时将点负载力分散到所有组件上,而不是仅在主枢轴点上。负载设置调节器会改变弹簧的压缩角,从而改变施力。
这听起来比实际复杂得多,考虑到制造过程中只有两个焊缝和一个弯曲(不包括替换的“下臂”)并且其他所有东西都用螺栓连接在一起,成本应该是最低的。
但无论如何,这是我的解决方案。 (为了利益,我会发布廉价和讨厌的版本)
更新____ 所以我调整了几何形状并简化了设计。它现在只有两个负载设置(Full x(o.89) - Half x(0.445) (x=spring rate) @45deg)+ park .....享受!____更新
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250