资源下载
资源下载
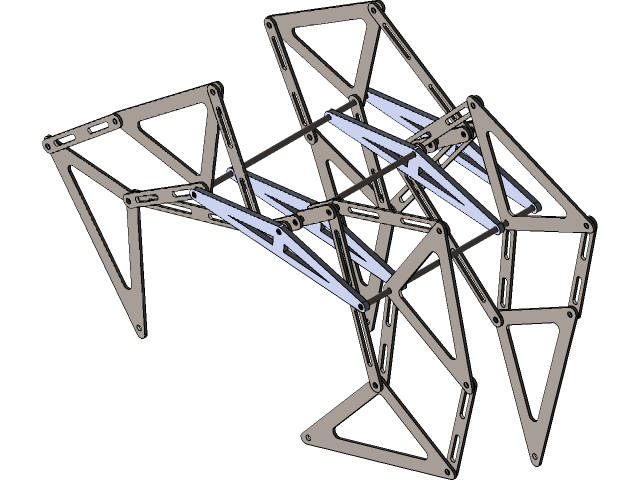
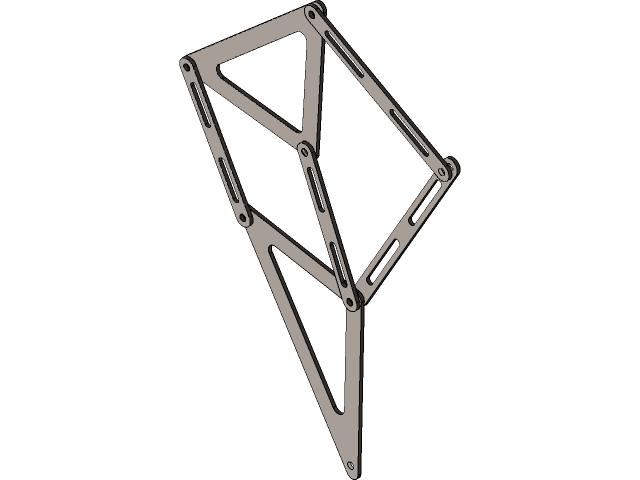
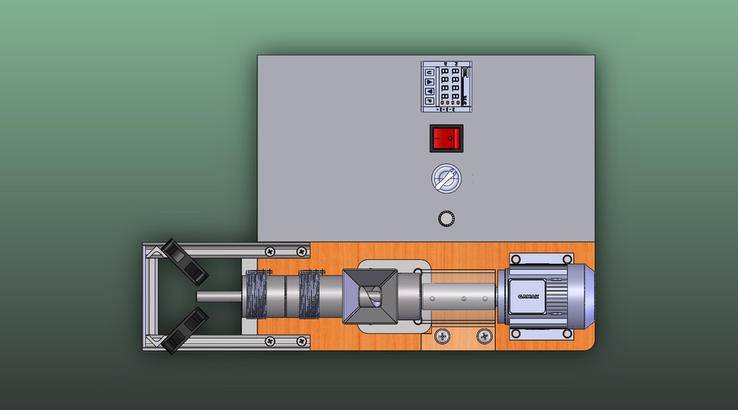
Theo Jansen行走机构
文件列表(压缩包大小 627.10K)
免费
概述
西奥·詹森(Theo Jansen)的联系。 詹森斯的链甲兽
詹森的连杆机构是由动力学雕塑家西奥·詹森(Theo Jansen)设计的平面腿机构,用于模拟平稳的步行运动。詹森(Jansen)在各种动态雕塑中运用了他的机制,这些雕塑被称为Strandbeesten(荷兰语为“海滩野兽”)。 Jansen的联动装置使用简单的旋转输入模拟有机步行运动,具有艺术和机械优点。这些腿部机制可用于移动机器人和步态分析
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250