 资源下载
资源下载
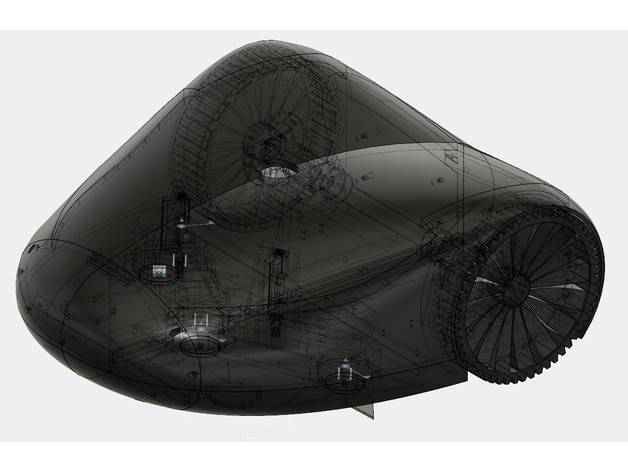

验证机器人割草机(概念车体-建造中)
文件列表(压缩包大小 7.42M)
免费
概述
我一直在考虑开发一种机器人割草机,而现在它实际上是一种“机器人”。我的意思是,它可以根据环境和条件做出自己的决定。我之所以认为这是一个有趣的项目,是因为我在使用现有的机器人割草机时遇到了很多问题,它们根本不够聪明。
我要寻找的功能: 1.没有周边电线。 2.不同的驾驶方式(对角线,花样线等) 3.3D映射。创建花园的3D地图。 4.准确知道机器人在花园中的什么位置。 5.如果割草机刀片移动得太重(如果设置到较低的高度),则自动抬起它们。 6.使用相机识别草和颜色。
因此,有了这个愿望清单,我想出了该构建的以下硬件规格 Jetson TX2开发套件 扫描扫描 英特尔®实感™相机ZR300 2x直流行星齿轮减速电机24伏med Hall IC 30-33 RPM 8mm 2x Vapex锂电池6S 22.2V 4000mAh 25C XT60 英国威廉希尔SparkFun 9DoF 机器人爪2x45A ST 扩展范围— RTK GNSS模块 (我尚未决定的刀片式割草机电机。)
我每天都会更改所有型号,因此不会直接上传。 该项目正在进行中。 如果需要,请下载,但是可能会出现错误和身体上的错误。
我保持耳朵或眼睛睁开,以获取有用的反馈信息:-)
并请关注我的构建项目博客http://valify.se
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(1)

0/250
下载后的评价
感谢分享
2022-04-07
回复






