资源下载
资源下载



改进的越野设施移动机器人
文件列表(压缩包大小 115.17M)
免费
概述
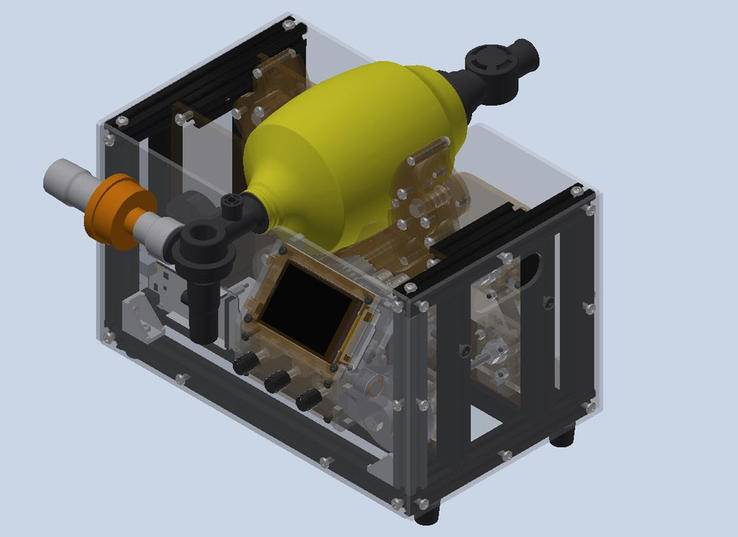
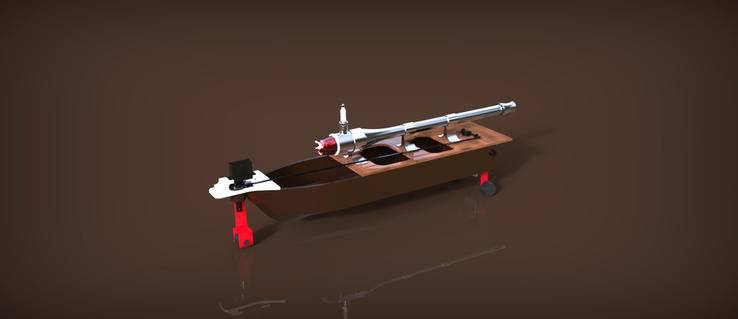
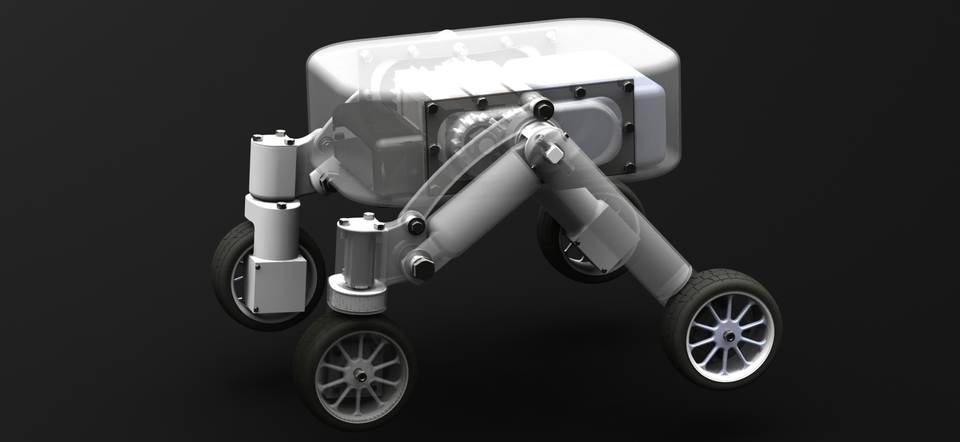
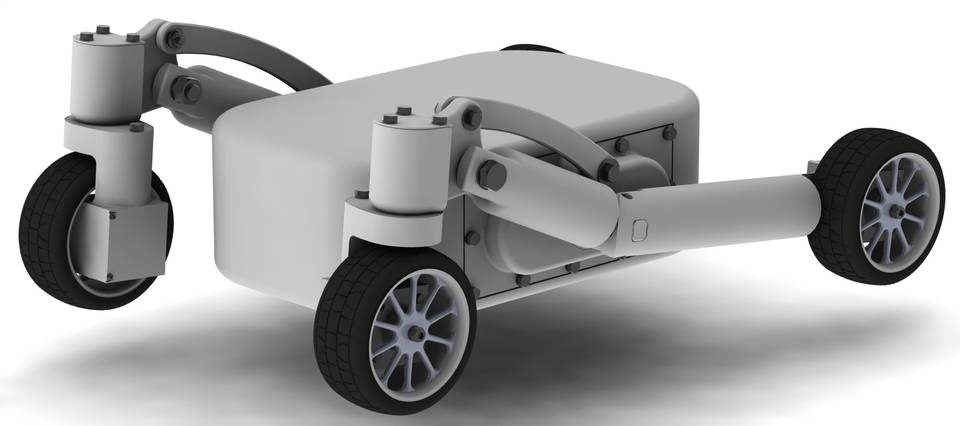
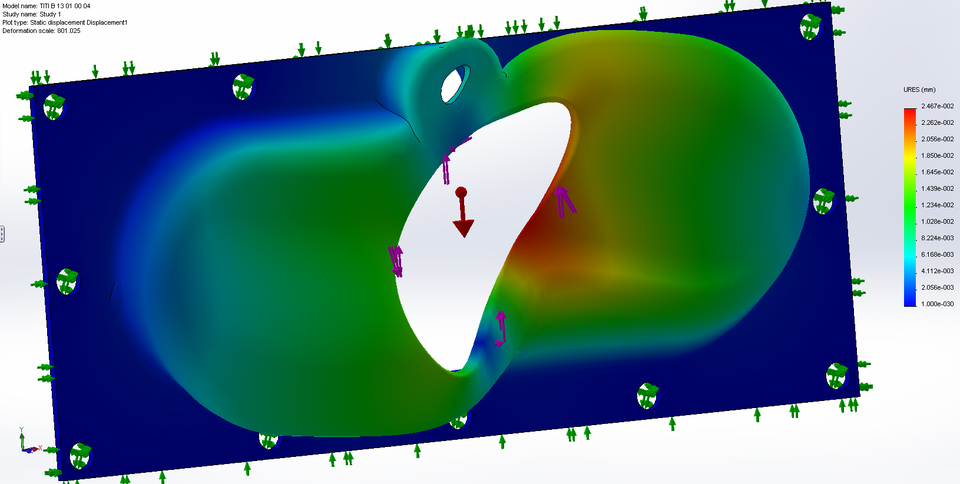
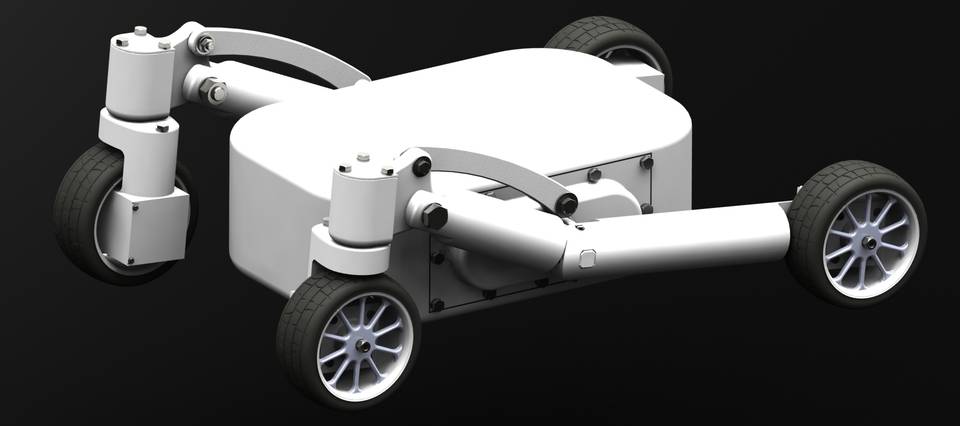
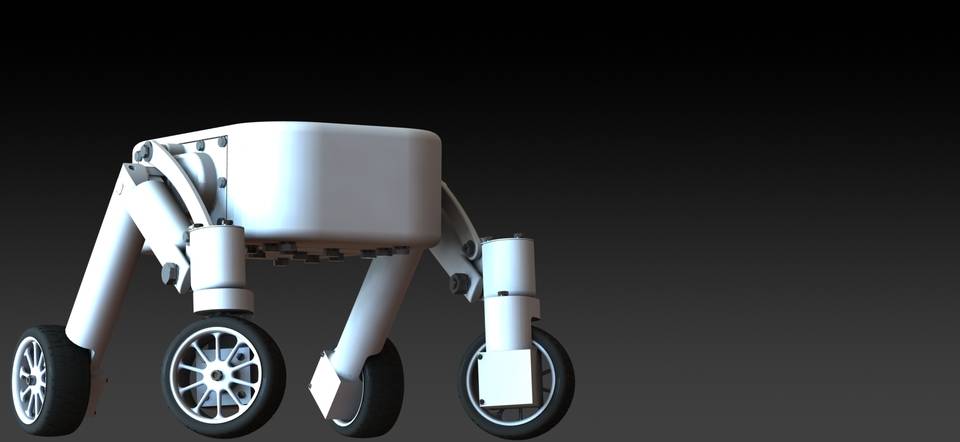
VGTU,维尔纽斯,立陶宛。运输工程 该学士论文“改进的越野设施移动机器人”的主要目标是分析世界上的移动机器人,其类型和参数,根据市场类似数据为该移动机器人设置参数,这些参数可能具有同等的竞争性或高于其他设计一个简单,容易,便宜且功能强大的移动机器人,计算其基本技术特征,定义其生产,维护和修理的允许和禁止使用的移动机器人,最后给出本论文的发现,建议和建议。图形部分由以下部分组成:机械手的一般视图,电动机安装架装配图,转向机构装配图,零件图和移动机器人特性图。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250