资源下载
资源下载
Arduino物联网机器人手臂

文件列表(压缩包大小 7.70K)
免费
概述
需要的元件
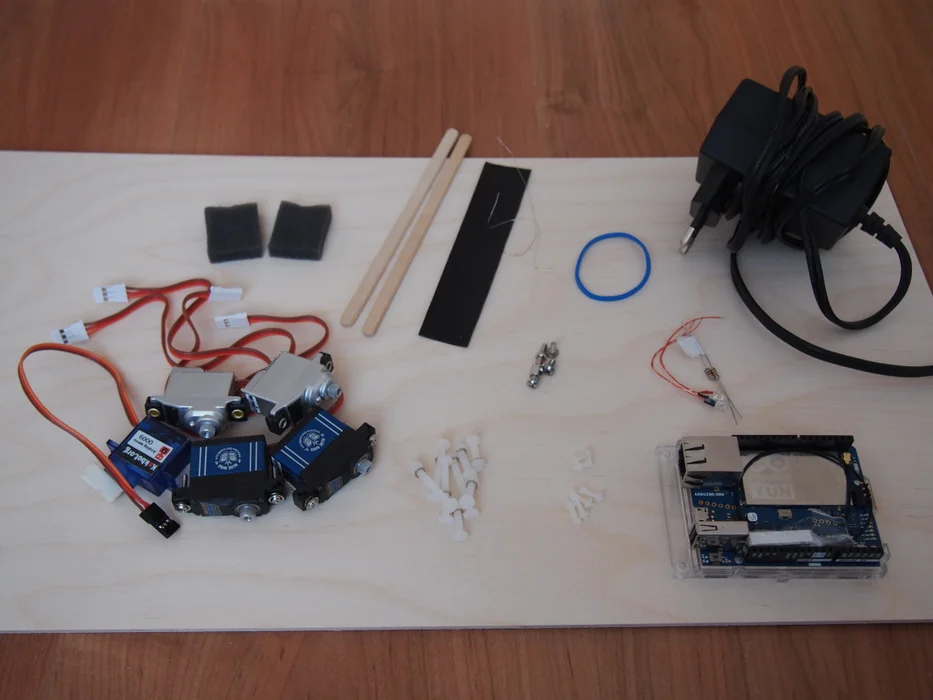
- 1 xArduino Yun(或Arduino开发板)
- 5 x伺服电机
- 1 x 5V 3.5A充电器
- 2 x Led的
- 2个电阻,分别为100 ohm(用于红色led)和150 ohm(用于蓝色led)
- 2 x木质搅拌棒
- 1 x金属线(或类似金属线的线)
- 1 x塑料片
- 1 x橡皮筋
- 2个小海绵(请参阅上图)
- 9 x M3塑料螺钉
- 6个塑料M2.5螺钉
- 1 x木板3mm(30cm x 50cm)
- 1 x木胶
原理及流程
本例程所提供的物联网机械臂具有以下功能
- 5个自由度的机器人(如果不包括抓爪,则为4个自由度)
- 由具有物联网功能的Arduino Yun控制
- 控制界面内置在Blynk应用中
- 在Matlab中使用Robotics Toolbox实现正向运动
- 我自己写的一个新库,实现了机械臂的平稳运动
构建机器人
要构建机器人,请先测量伺服器尺寸并检查伺服器扭矩。这将为你提供有关手臂大小以及最终机器人大小的指示。就我而言,我订购了2种不同的微型高扭矩伺服器:第一对和第二对。即使指定为120度,它们也可以转动140度。但是,我建议购买180度舵机以增加行程角度。对于夹持器,不需要高扭矩伺服器。taobao上最便宜的微型伺服器就可以完成这项工作。
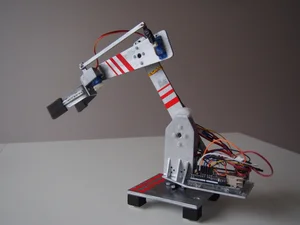
首先,从切割手臂开始,如图所示。在这里,你可以任意发挥创意,因为没有固定的设计。然后,使用一根切成两半的搅拌棒和塑料片作为弹簧复位件来构造抓爪。通过将电线连接到内侧,你可以关闭和打开夹持器。对于我的机器人,我使用了一个M3螺钉使抓具枢转。夹持器枢转是通过位于手臂另一侧的伺服器完成的,以实现重量平衡。动力通过另一个搅拌棒传输(参见机器人顶部的图片)。
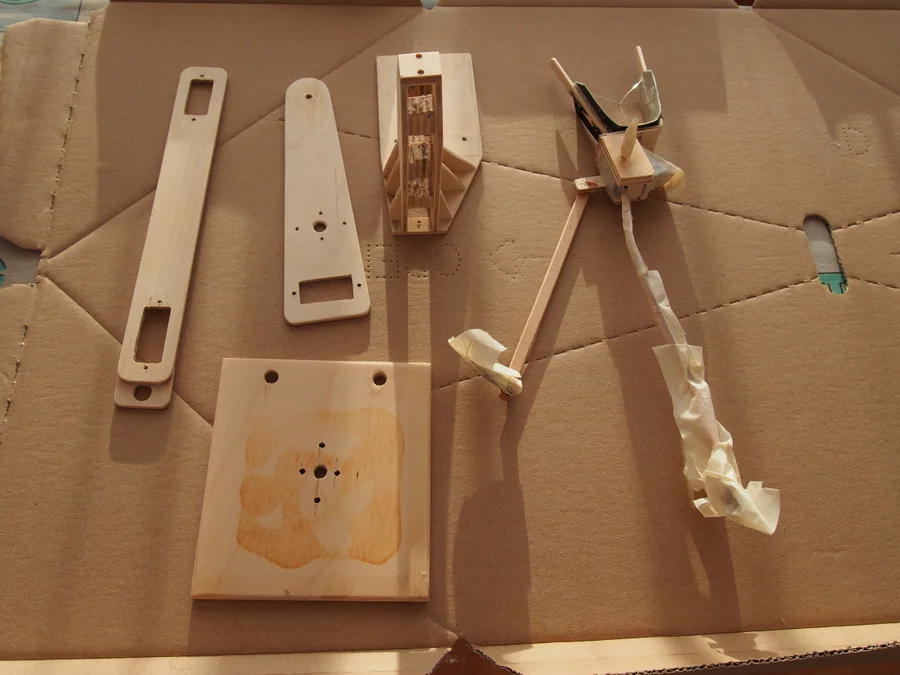
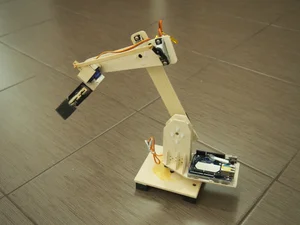
接下来,构建底座和用于固定底座伺服器和Arduino Yun板(或另一块板)的板。将所有内容放在一起,你应该具有下图中所示的内容。

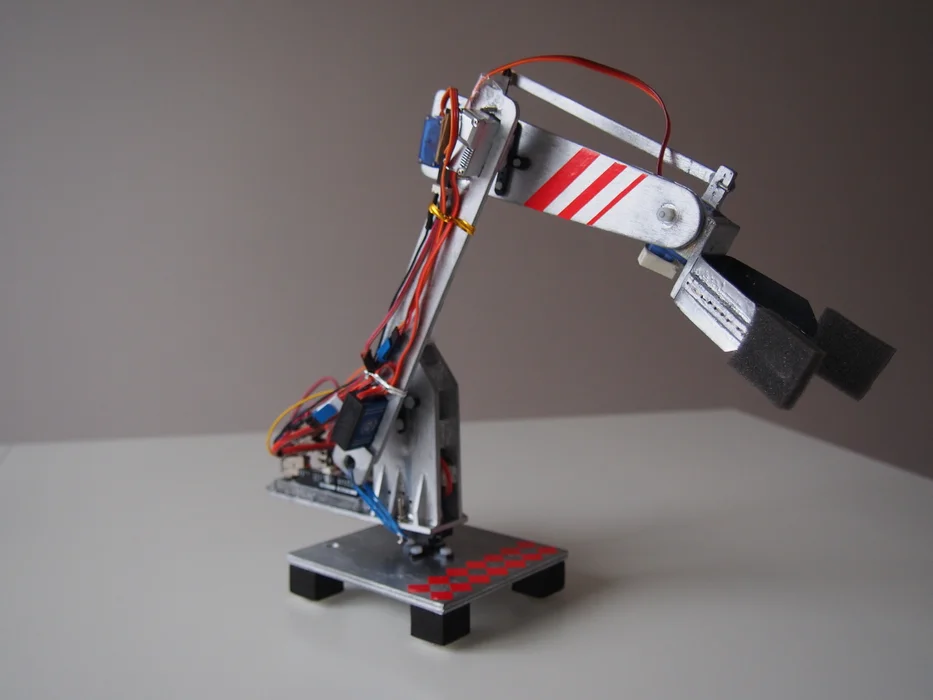
如果你想要更好的外观设计,请对木质部件进行打磨并用你喜欢的颜色对其进行油漆(如图所示)。对于我的机器人,我选择了带有红色条纹的银色(模仿金属)。
编写代码

我们已经完成了硬件的制作。但是,没有软件,机器人就没有生命。
对于软件,我首先在Blynk中创建一个接口。如果你以前从未使用过Blynk,请登录其网站以了解操作方法。
注意:如果你没有可连接到互联网的开发板,请不要担心,你仍可以通过USB端口将Blynk与Arduino Uno等常规开发板一起使用。点击此处阅读教程。
下面让我们进入Arduino IDE编写一些代码。为了方便起见,我在下载区附加了代码,因此你需要运行它,你需要执行以下操作:
- 配置Arduino Yun开发板
- 通过转到Sketch> Include Library> Manage Libraries在Arduino IDE中安装Blynk库,搜索Blynk并安装它。
- 将名称为SimpleTimer的文件夹中的SimpleTimer库添加到Arduino库文件夹中,通常是Arduino \ libraries \
- 将我编写的MotionGenerator库添加到Arduino库文件夹中,该文件夹名为MotionGenerator
- 编译并上传RobotArm_instructables.ino (注意:不要忘记更新你的Blynk令牌)
注意: MotionGenerator库是一种基于分析的解决方案,可为你提供从一个点到另一个点的平滑过渡。它允许限制最大速度和加速度。
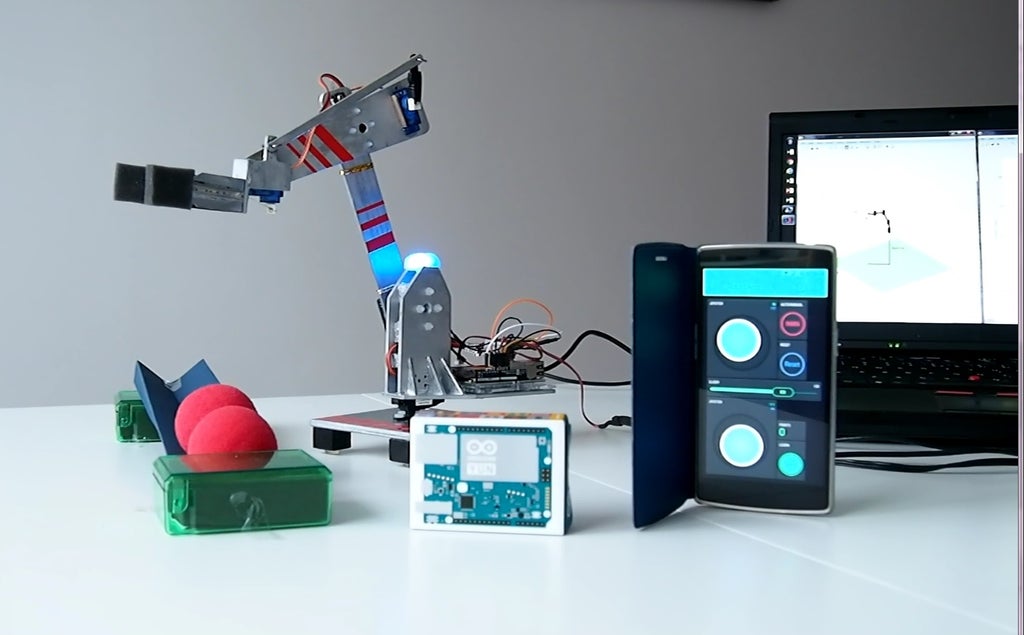
可选步骤(正向运动,请参见下图):为此,你需要Matlab和Robotics Toolbox。如果完成所有这些设置,请确保将机器人连接到Blynk并连接到计算机的USB端口。Matlab将通过串行通信从Arduino收集信息。因此,请确保在MainScrip.m中填写正确的COM端口。最后,只需运行MainScrip.m。

注意:机器人运动学适用于我自己的机器人。对于你的机器人,尺寸可能会有所不同(请在robotKinematicsFcn.m中随意调整)。
下载区下载以下代码
- roboticArm_instructables.ino
- SimpleTimer.cpp
- SimpleTimer.h
- MainScript.m
- robotKinematicsFcn.m
- setupSerial.m
- readValue.m
测试
至此,机械臂就完成了。
最后
所有需要的文件在下载区均可找到。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250