资源下载
资源下载


动态系统工程项目
文件列表(压缩包大小 83.45M)
免费
概述
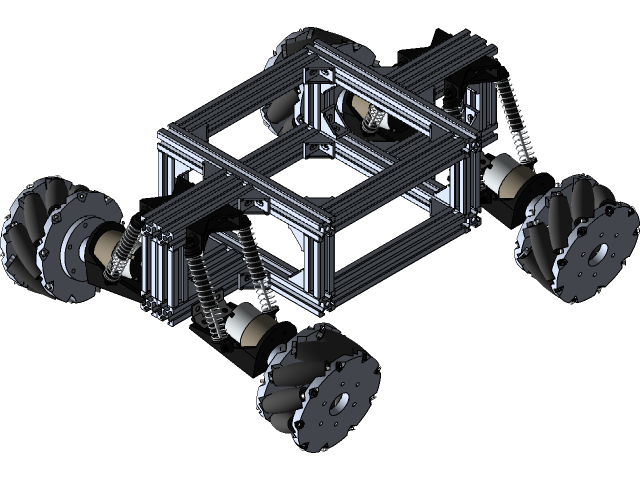
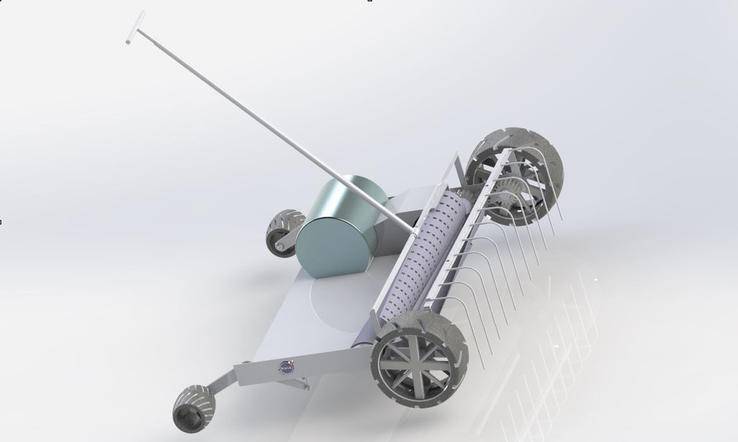
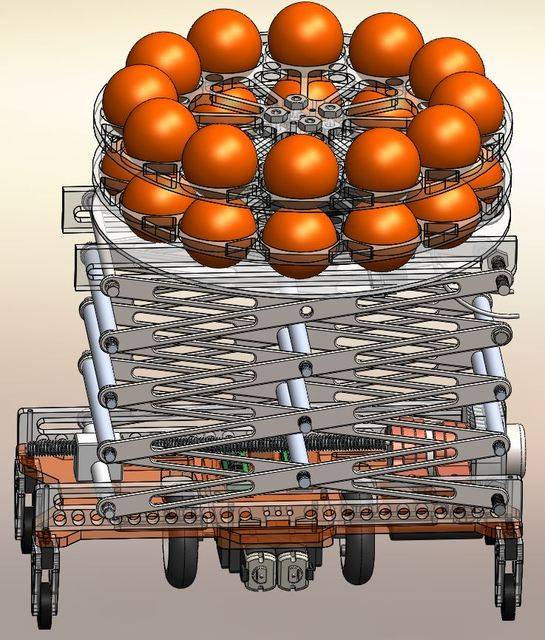
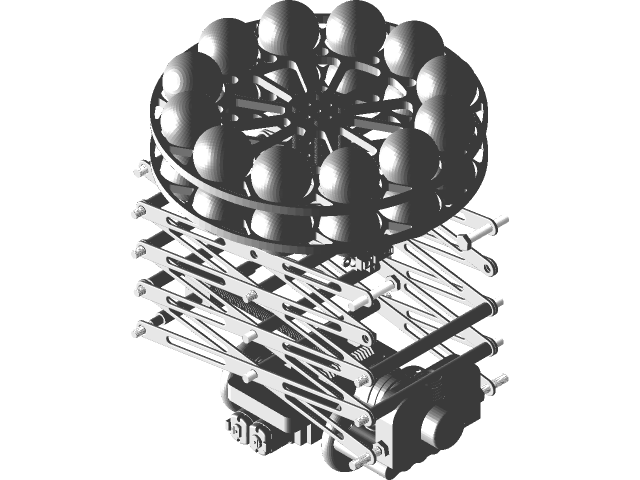
在前一个学期在密西根州大急流城GVSU上学的时候,这个项目就花了很多时间。它是由电池组供电并由atmega644p微控制器(又名MW3板,又称忍者板)控制的机器人。该机器人使用距离传感器将其驱动到大约30英寸高的墙壁,然后使用剪式举升机将其抬起。摇动球,检测孔,并在每个孔中分配2个球。此CAD设计没有显示稍后安装的某些IR传感器。机器人上的几乎所有东西都是从零开始在Solidworks中创建的,然后在HAAS CNC上铣削出来的。使用C对微控制器进行编程。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250