 资源下载
资源下载
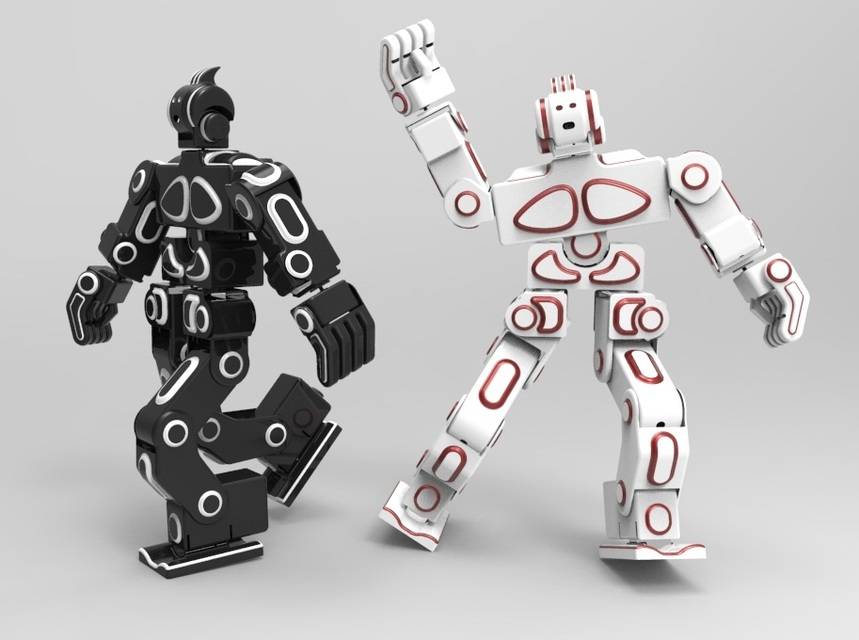
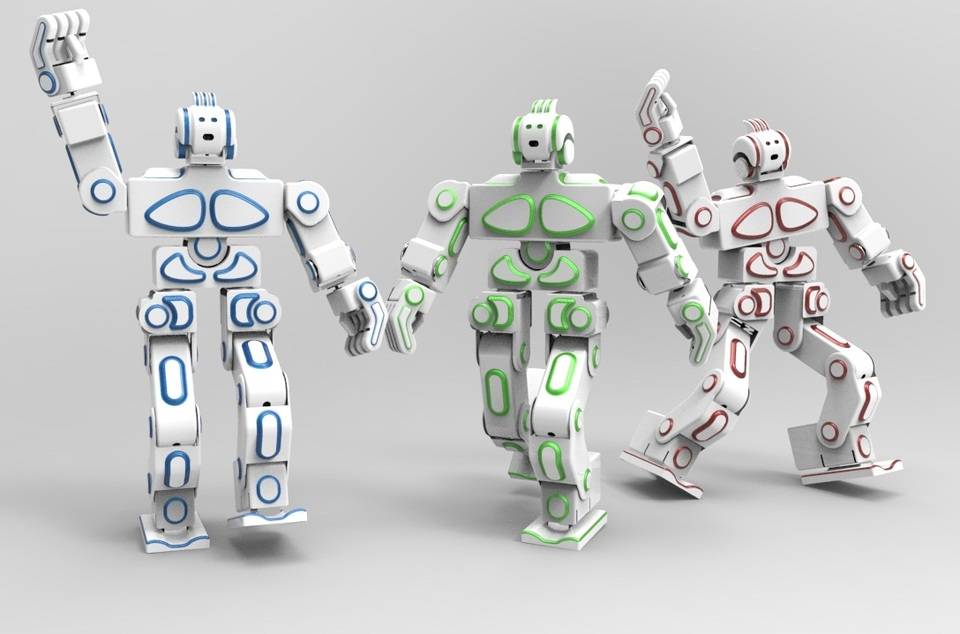

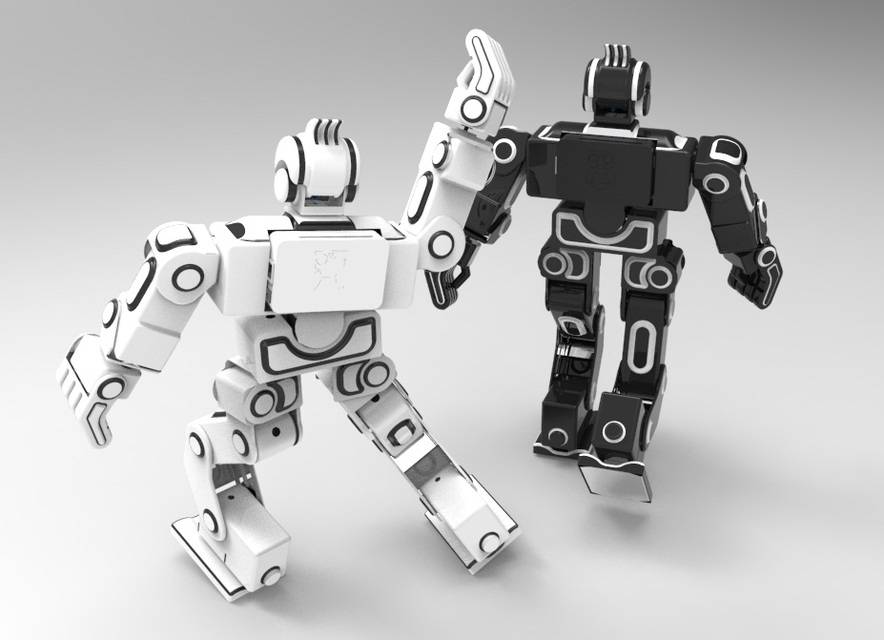
RoboSavvy人形机器人V2
文件列表(压缩包大小 97.03M)
免费
概述
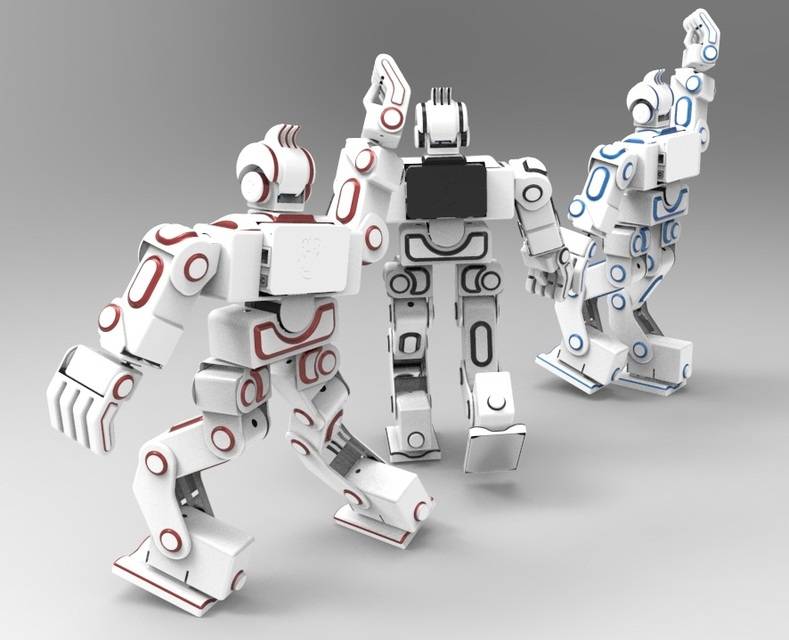
•通过减少铝制结构部件来减轻重量。
•几乎所有的结构零件和电子设备都被外壳覆盖(只有很少的地方可以看到铝制结构零件,而覆盖这些零件会减少机器人的运动范围)
•该设计允许机器人进行操作; 走 改善走路时的转弯(只需抬起一只脚就可以使整个身体转弯) 爬行 从前后躺在床上起床 抓住手指握住物体 用相机摇摄云台并倾斜 腕部旋转以允许使用笔/铅笔进行书写 等等…
•以上所有动作均通过19台AX12 / 18伺服器以及另外6台用于头部和手腕的HXT900微型伺服器进行存档。 HXT900 Micro Servos 链接:http://www.hobbyking.com/hobbyking/store/__662__HXT900_9g_1_6kg_12sec_Micro_Servo.html
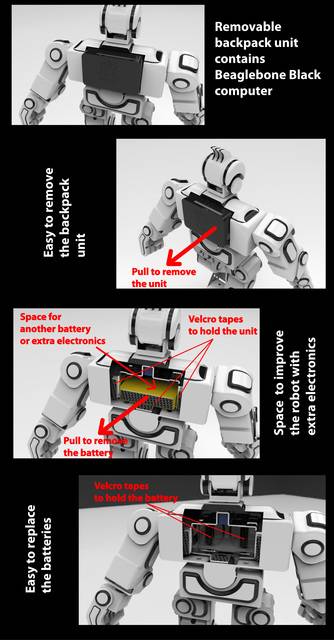
•使用魔术贴胶带将紧凑型电池连接到机器人的胸部,以便快速更换。 Zippy紧凑型1300mAh电池 关联: http://hobbyking.com/hobbyking/store/__21338__ZIPPY_Compact_1300mAh_3S_25C_Lipo_Pack.html
•内部空间可容纳额外的电池或其他电子附件。
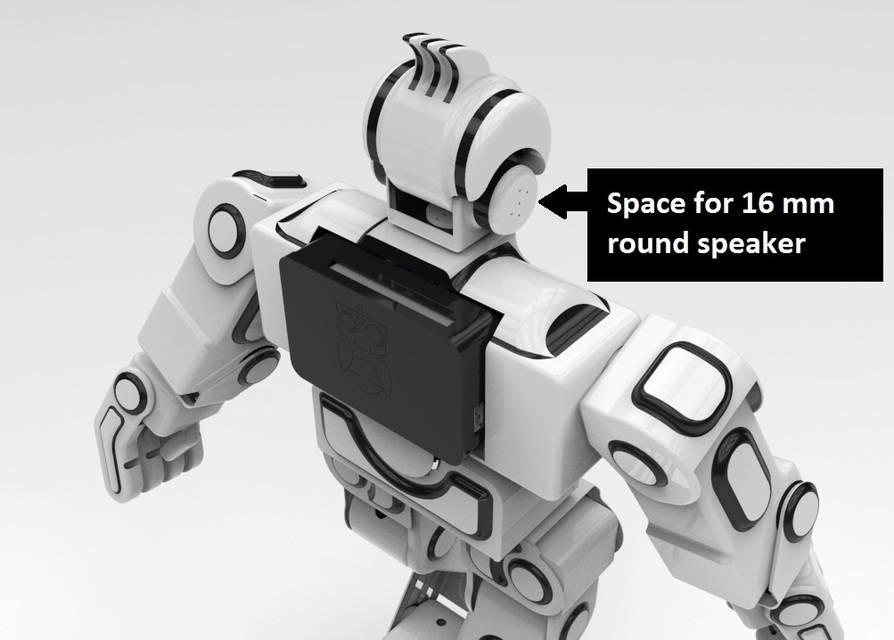
•头壳内的空间分配给两个16mm圆形扬声器,并为诸如麦克风,传感器等小型电子设备提供了更多的空间。
•Beaglebone Black嵌入式计算机单元与外包装一起使用,使其具有背包般的外观。该单元使用维可牢尼龙搭扣带固定在机器人上,必要时可轻松拆卸。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250





