资源下载
资源下载

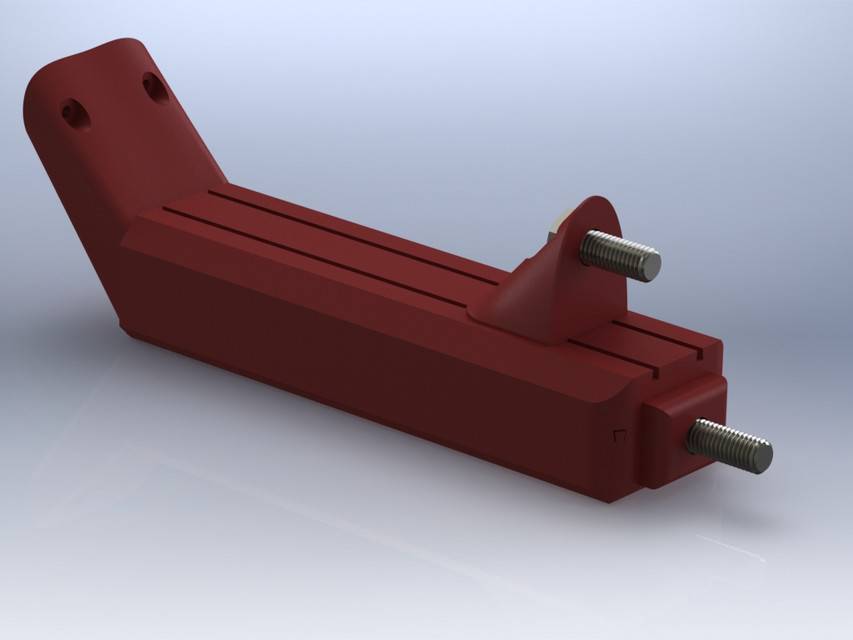
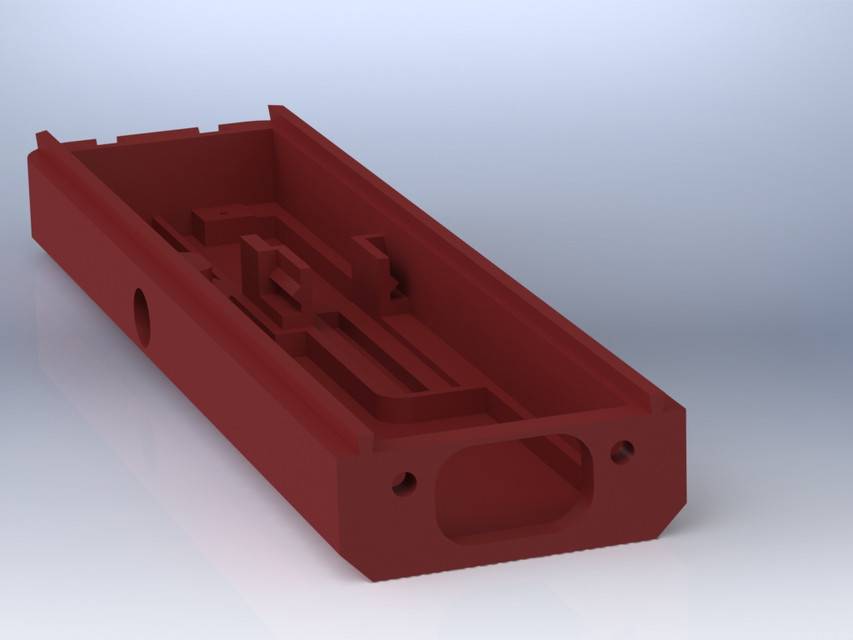
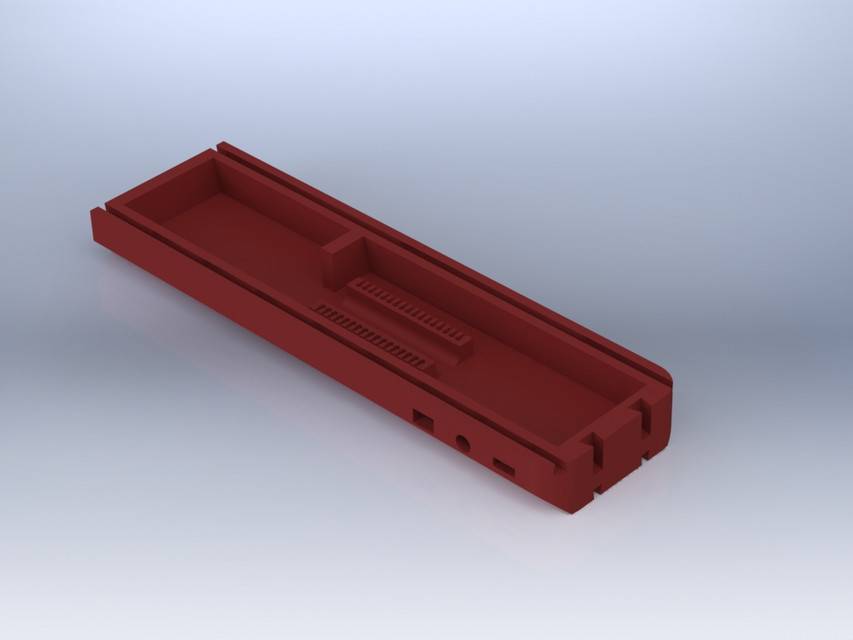


PTD执行器,Arduino驱动
文件列表(压缩包大小 57.40M)
免费
概述
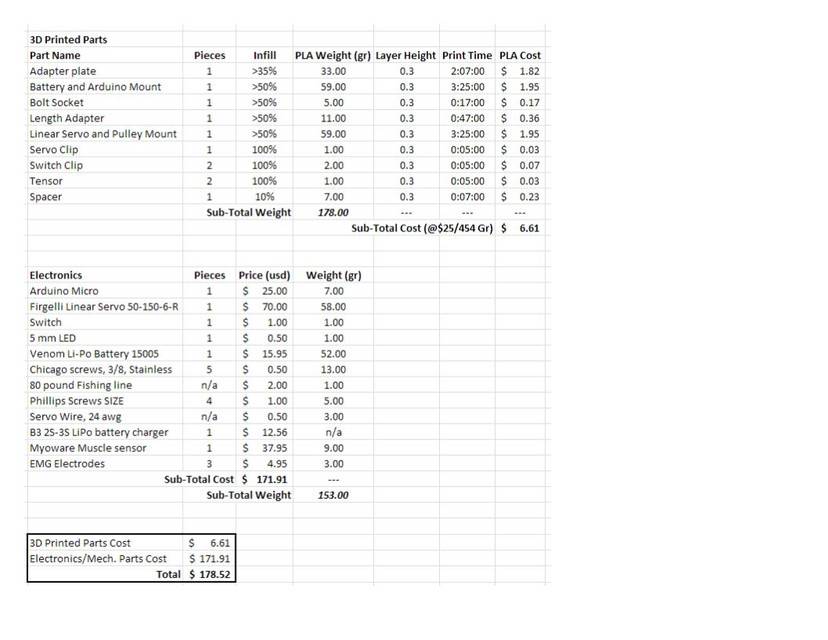
您好,我会尽力使此说明尽可能简短,但请随时提出任何问题。 当我看到eNABLE的功能并开始阅读eNABLE社区成员在设计,打印和组装任何形式的假肢时遇到的问题时,我能够识别出几乎所有情况下都常见的几个问题,于是我决定开始努力尝试解决这些问题,力求做到最好。 因此,我首先确定了尺寸/大小问题;当印刷的手涉及螺钉或螺栓以及其他标准尺寸的硬件时,正确缩放到收件人的自定义尺寸变得非常成问题。 然后是其中的机械部分。我所见过的所有系统都使用接收者前臂/手腕上的力来打开/关闭它。 (V / O,V / C)这有很多缺点,因为每个接收者都是不同的,而且设计似乎对某些人有用,而对其他人却不起作用(弯曲和伸展不同),以及它所施加的力量相应地变化,但总是在前臂/手腕本身规定的某些值内(永远不会太强)。 我们也遇到了3dprinters中的限制,即无法准确打印较小的特征,而且随着特征变小,塑料本身的机械性能也达到了限制。 同样关于比例/大小,还有关于经径向截肢的事情,以上情况(手腕操作)不适用。 此外,关于同时控制各个手指的事情似乎是非常不利的,因为在大多数情况下,所有手指都有一个共同的枢轴点,这又使抓握非圆柱形物体变得非常困难,即使不是不可能的。 因此,我开始研究这些主题并设计了这些作品,在这里向您介绍。 我设计了一种机箱,在机箱中发生了机械方面的事情,不需要缩放,并且可以与任何类型的3dprinted手(PTC)进行交互,从而消除了硬件尺寸变化带来的问题。 此外,我设计了一种滑轮系统,该滑轮系统使驱动伺服机构可以完成的工作成倍增加,同时还设计了第二个滑轮系统,该系统允许手指稍微独立地移动,从而使他们有更大的自由度来抓握锥形物体或其他非圆柱形物体。 如果外壳在肘部和手腕之间有足够的空间,则可以将其轴向(共线)安装在接受者的残肢上,也可以通过一对适配器将其安装在残肢的下侧。 (这部分仍在进行中,但是我认为当前版本可以正常运行)。 一切都设计为3dprinted,无需任何支持,从而使任何人都无需任何知识/技能即可轻松组装它。 我还尝试去除尽可能多的材料,以使它尽可能轻但尽可能坚固。 所有3dprinted零件的重量均为178克。 最重的部分是电池和控制运动的线性伺服。 该运动是通过Arduino Micro微控制器执行的,该微控制器从置于二头肌肌肉群上的Myoware传感器读取值。 Arduino致动伺服器,该伺服器通过倍增滑轮和张量系统移动手指,该张量系统允许手指之间的独立运动。 我写了一个Arduino草图(代码/程序),每次打开系统时都会对传感器进行校准,因此,如果Myoware传感器的读数根据其在接收者手臂上的位置而变化,则系统会适应这。 该系统在组装时最难的部分是它需要焊接,就是这样,非常简单。 我试图使其尽可能简单,轻便,高效,便宜和坚固。 我使用的红色PLA是在195c上印刷的,层厚为.3mm,填充百分比不同,所有印刷在Makerbot Replicator 2上,并使用Flexy-Hand(由Gyrobot制造)来演示我的设计工作原理。 显然,该设计可以并且将与通过拉线(肌腱)致动(V / O,V / C)的任何PTD设计配合使用。 您可以在随附的文件中找到材料的完整列表及其建议的打印设置和特性,以及所涉及的Arduino代码和组装说明。 即使对于具有多个技术要求的PTD来说挑战很大,而我的设计也不完全符合所有这些要求,但我认为这是分享此工作的绝佳时机和机会,我认为这是非常有帮助的(主要是在概念上而且还在执行中)。 我真的希望这对eNABLE社区有所帮助。 再次感谢您的阅读,请随时对本设计发表评论/询问我。
何塞·桑托斯·利兹卡诺。
更新:抱歉,忘记包含arduino代码。现在可以下载。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250