资源下载
资源下载








稀土提取器REGOLIGHT
文件列表(压缩包大小 51.62M)
免费
概述
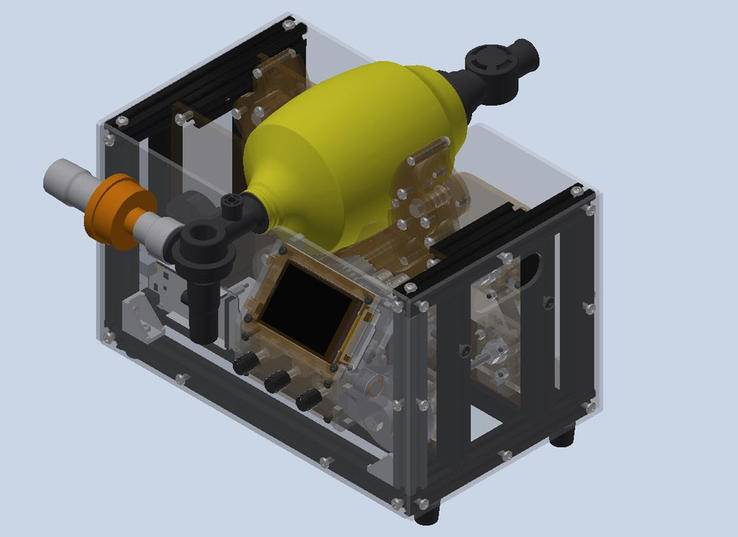
在NASA Regolith高级地面系统操作机器人(RASSOR)斗鼓设计挑战项目的框架内,开发此系统是为了提供有效的解决方案。 此处提供的解决方案显示了轻巧高效的设计。
旋转铲斗设计提供了一种解决方案,可最大程度地减少摩擦。 这些铲斗安装在轴上,并由于安装在其轴上的集成“板簧”而返回到其初始位置。 主凸轮允许运动学优化中央储罐中的碎石排出。 在整个灌装阶段,中央储罐保持水平位置,顶部开口。 然后,通过臂内的皮带激活水箱,以启动排放。 附加的皮带驱动铲斗旋转以依次将其清空。 碳-钛-镁设计 3D可打印复合轴承 每个桶的最大填充量为22.4升。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250