资源下载
资源下载


挠性扶手夹
文件列表(压缩包大小 5.17M)
免费
概述
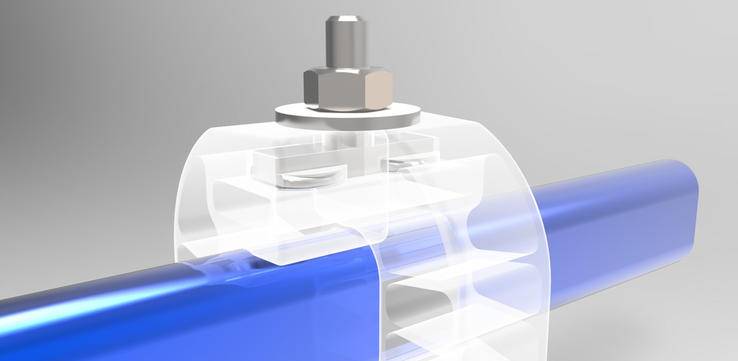
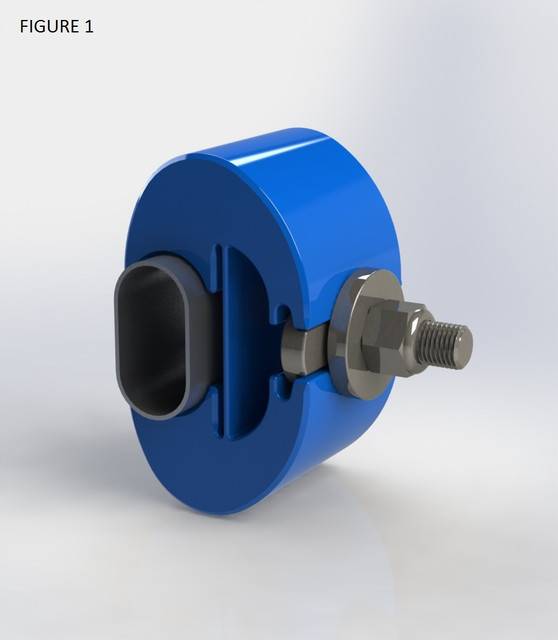
图1:已安装并固定了安装适配器的夹具。 -固定安装适配器会产生弯曲张力,并增加夹紧力。 -在屈服开始之前,由于固定了安装适配器和外部负载,弯曲可能会产生120 lbf的张力。
图2:夹紧状态为自由状态,已印刷。 -Z轴平行于扶手长度方向。 -弯曲的弯曲,在自由状态下具有抛物线轮廓。
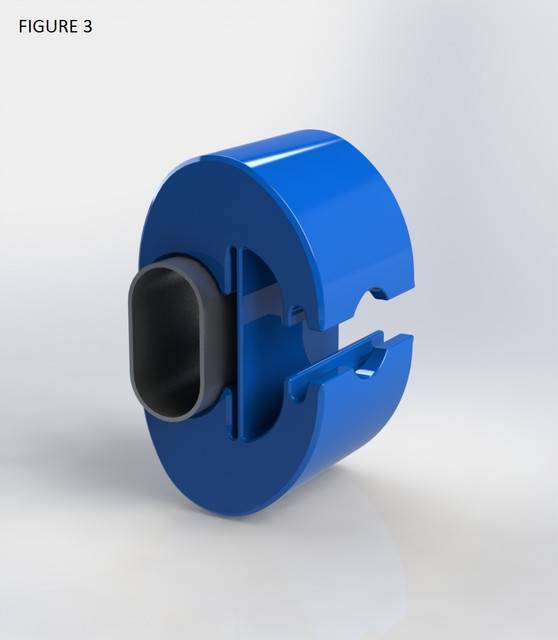
图3:夹钳安装在扶手上。 -安装在扶手上时,弯曲会变直。 -在安装和固定安装适配器之前,轻的夹紧力约为1.3 lbf。
图4:安装步骤。
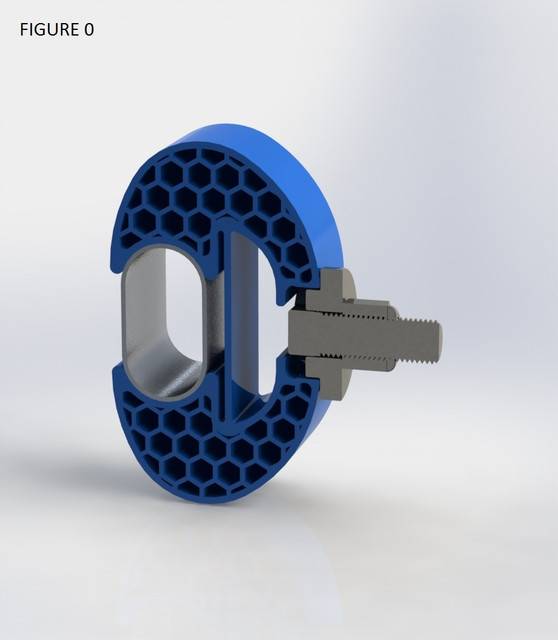
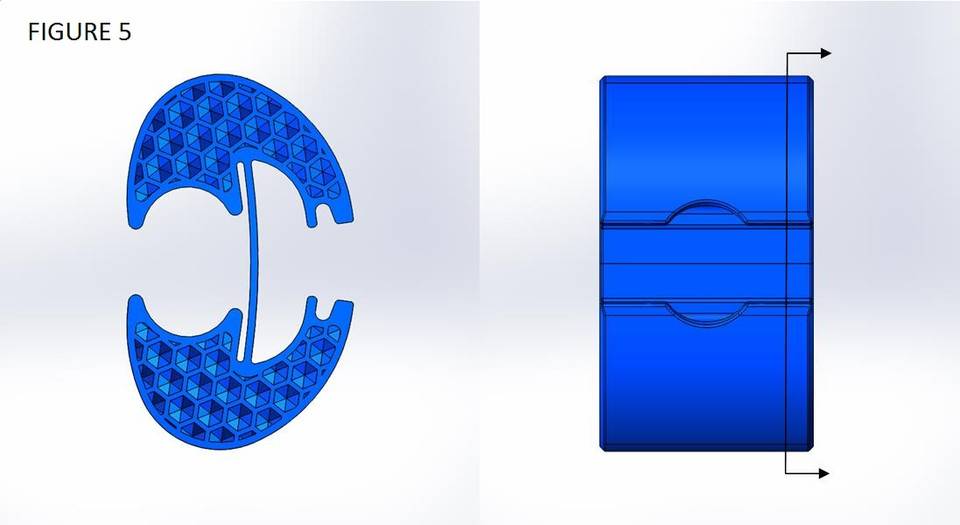
图5:显示内部结构的剖视图。 -内部蜂窝结构-轻巧而坚固。 -蜂窝壁和夹钳侧壁之间的倒角可将最大悬伸保持在45度。
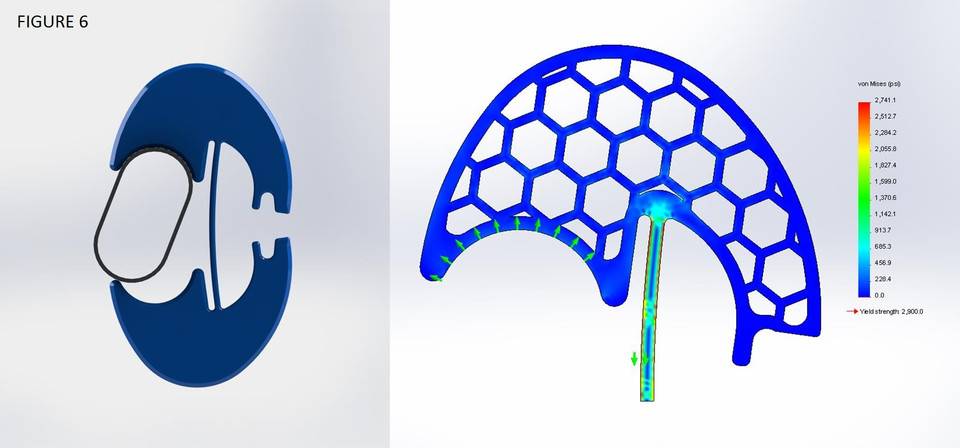
图6:在安装过程中获得最大柔韧性的FEA结果。 -二维平面应变非线性(大位移)FEA分析。 -在安装过程中,弯曲会产生95%的屈服应力。
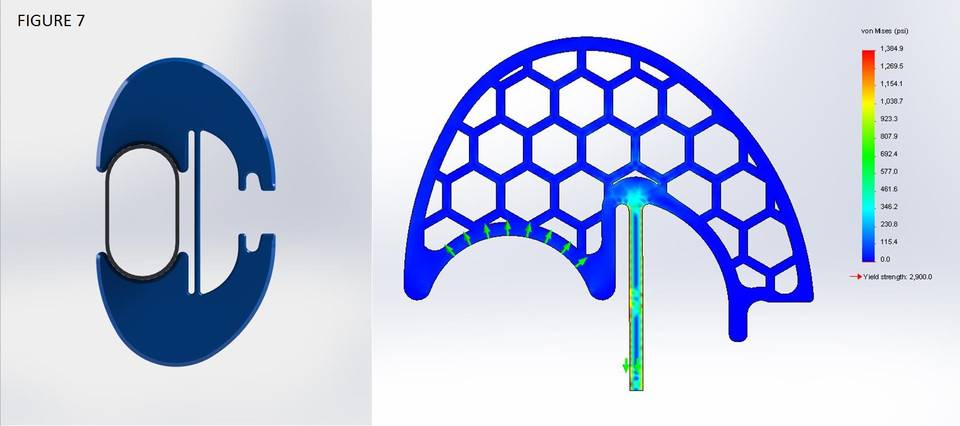
图7:安装在扶手上的夹具的FEA结果。 -安装在扶手上时,弯曲会产生48%的屈服应力。 -屈服前,弯曲会产生120 lbf的额外张力。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250