资源下载
资源下载




RTP-机器人测试平台(无人机/机器人)
文件列表(压缩包大小 58.17M)
免费
概述
我和我的一个朋友正在研究一个新项目,我们希望与其他发烧友分享。我们已经尝试了Atmel AVR的一段时间,并且有各种各样的Arduino板和扩展模块。但是,到目前为止,我们再也没有进行任何测试,而是进行了一些基准测试!
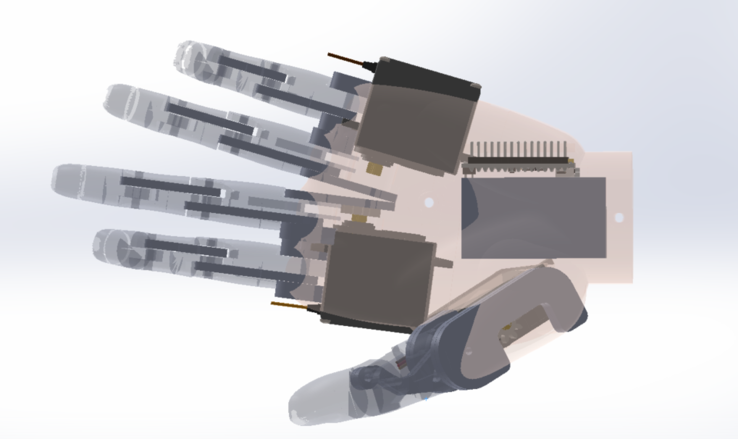
我们决定建立一个机器人测试平台,该平台将适合测试众多电子电路和程序。 (因此命名为RTP)它最初是从一些计划开始,计划是建造一个小型木制平台和一些传动马达,但很快就扩展到可以自动驾驶到外部的功能。我们的计划是为机器人配备传感器,照相机和GPS接收器,并能够与计算机,平板电脑或智能手机建立行驶路线。
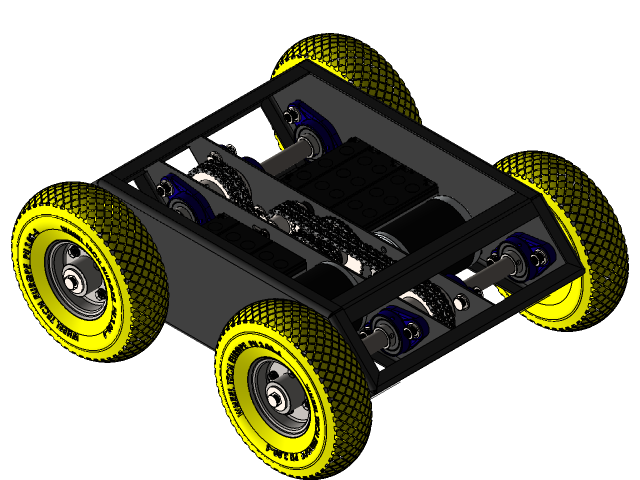
在对标准硬件零件,电机,电子设备和电池进行了一些研究之后,我们开始使用SolidWorks设计机器人。我们提出了由钣金构成的框架,该框架将构成机器人的基础。对于动力传动系统,我们选择了两台500W 24V电动自行车电机,这些电机由六个12V 7Ah SLA电池供电。为了控制电动机的速度,我们获得了两个非常适合该项目的36V 70A速度控制器,因为它们同时支持PWM输入信号和RS232连接。
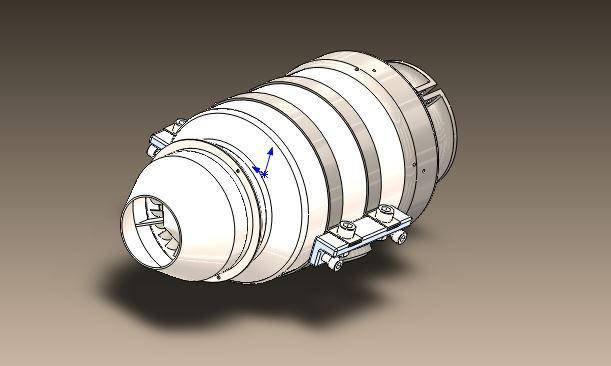
在开始构建实际框架之前,我们想检查一下动力传动系统是否存在任何问题。我们建立了一个临时测试设置,可以测试电动机,速度控制器和变速器。在下面的视频中,您可以看到一些我们做过的第一批测试的录像。看起来其中一个轴是弯曲的,但这只是一个轴承,由于其中一个齿轮未对准而在其外壳中扭曲了。 (最终修复!)在测试之后,我们改变了一些齿轮的位置,但没有什么特别引人注目的。
下一步是机器的实际构建。幸运的是,我们可以使用我们需要的所有工具参加一个不错的研讨会。 (激光切割机,折弯机,车床,铣床和适当的焊接设备)这使建造变得容易,我们在周末完成了大部分工作。
框架组装完成后,我们测试了所有零件。这意味着组装整个机器,并为我们提供了首次开车的机会。如您所见,电池和电子设备安装在机器顶部的位置仍然需要确定其安装支架的位置。
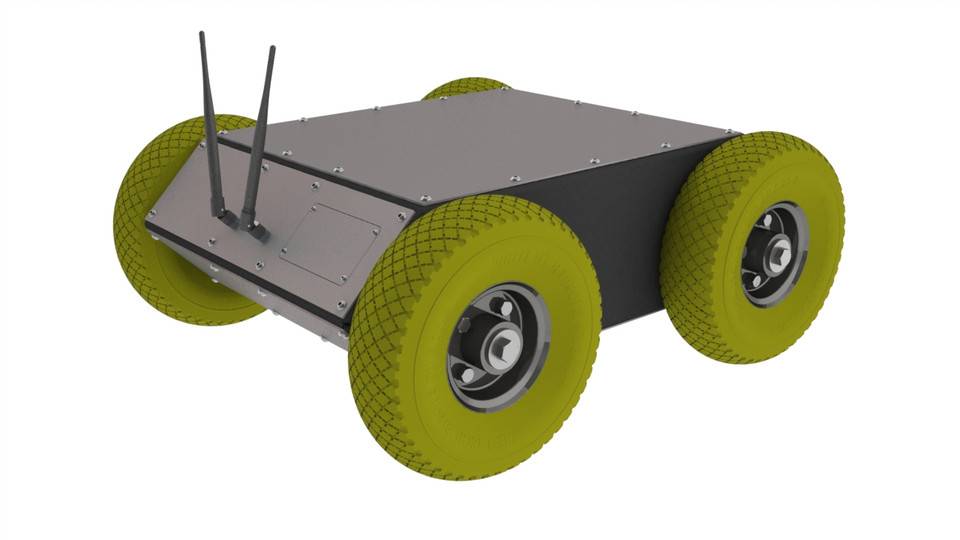
所有零件都安装得非常完美,更重要的是,机器人的行驶效果非常好!我们将其完全拆开,并对大部分组件进行了喷砂处理。这不仅消除了大部分锐利的边缘和磨削痕迹,而且还为粉末涂料提供了良好的裸露金属表面,使其得以粘附。我们选择了一款超赞的深灰色质感涂料!我们开始组装机器人并拍摄下图。
最后一步是创建底面板,顶面板,前面板和后面板,以关闭内部部件并保护它们免受任何灰尘,沙土和水的侵害。对于这些面板,我们选择了较浅的灰色,在深灰色和黄色旁边看起来不错。
可以在以下位置找到图像:http://gallery.datmartens.com/?jgall_dir=Robots%2FRTP+-+Robotic+Test+Platform%2F& 可以在以下网站找到视频:http://www.youtube.com/playlist?list=PLlnGjcgHt2j4g7yaxNasGGMuws9Ea-aE-
如前所述,这是我与Stef van Itterzon一起进行的项目。请务必查看他的网站:www.svitterzon.nl
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250