资源下载
资源下载
ROV夹爪(爪很好,休息很久,很旧)
文件列表(压缩包大小 2.44M)
免费
概述
我的机器人手参加LBCC 2014 MATE竞赛ROV。 1-2版:训练机械学习的残骸。
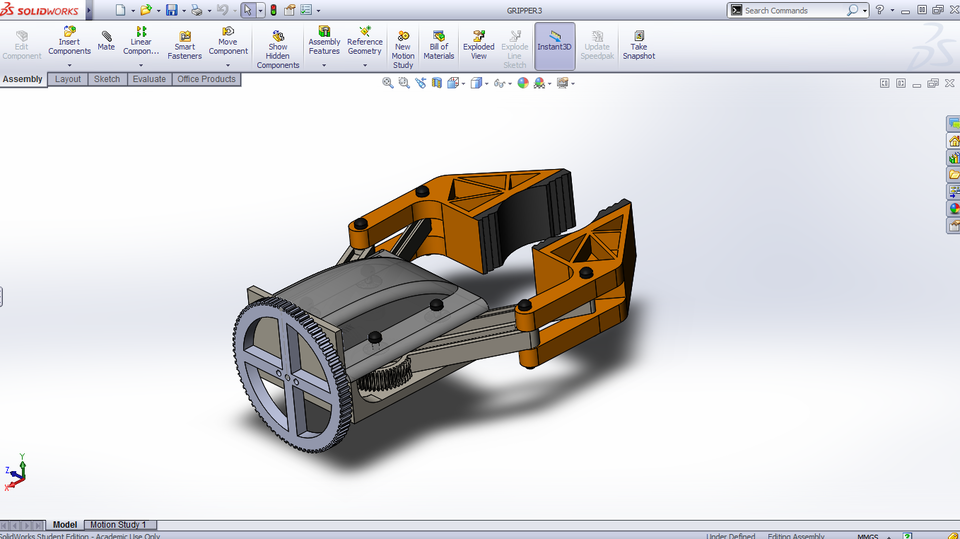
版本3:驱动齿轮和蜗杆的基本手不匹配,由于需要360度旋转,所以步进机最终不会出现
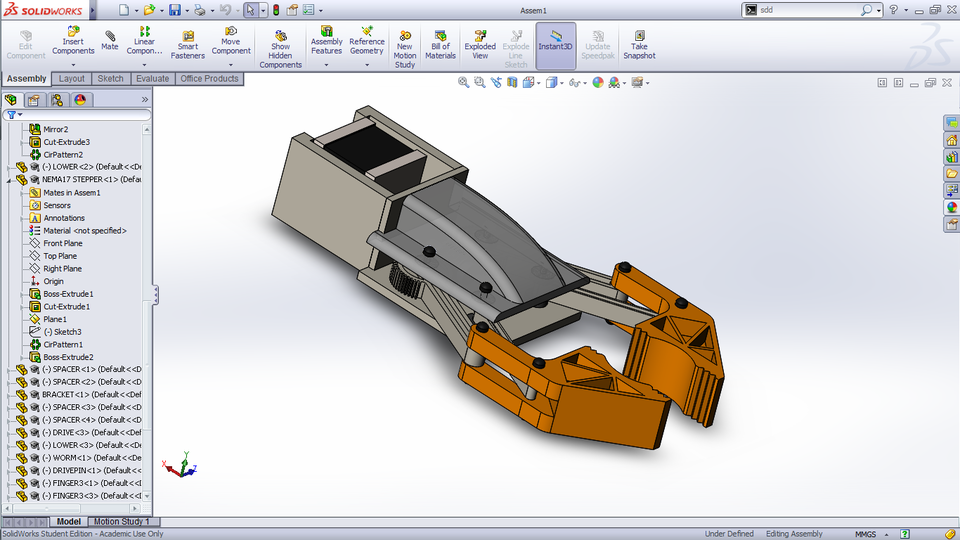
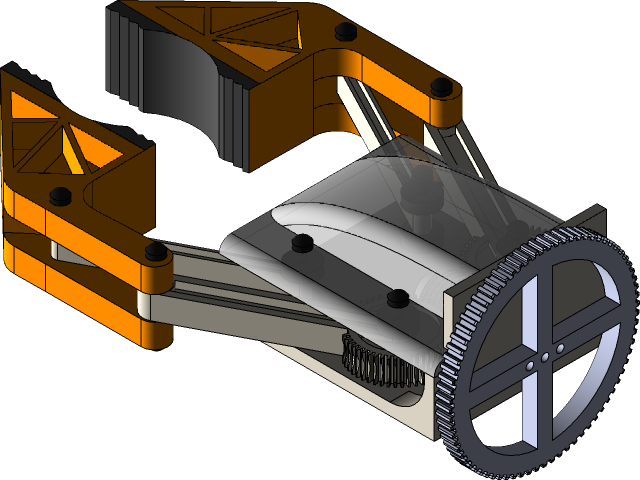
第4版(11/27/13):蠕虫和蜘蛛的网格笨拙,仍在设法解决。增加了用于360度旋转的安装和齿轮。蜗杆的驱动杆将穿过安装座,进入位于手腕/前臂部件上的步进器。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250