 资源下载
资源下载
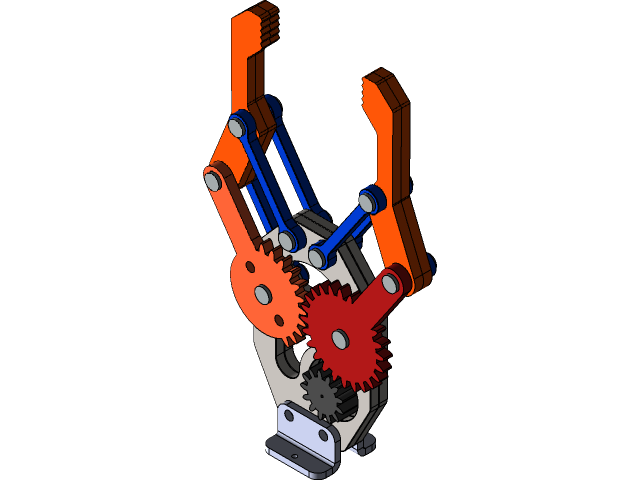
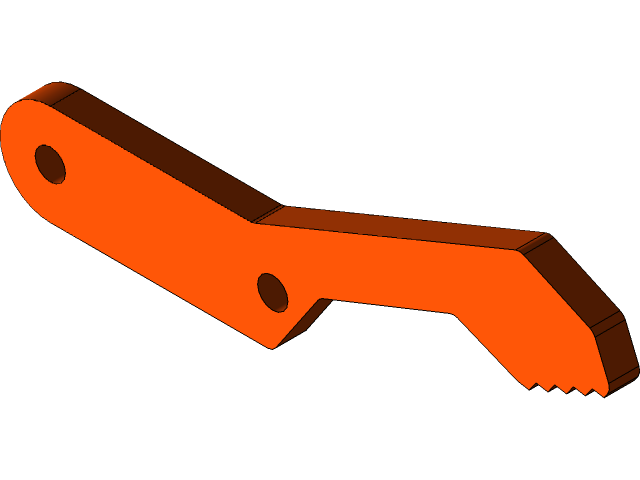



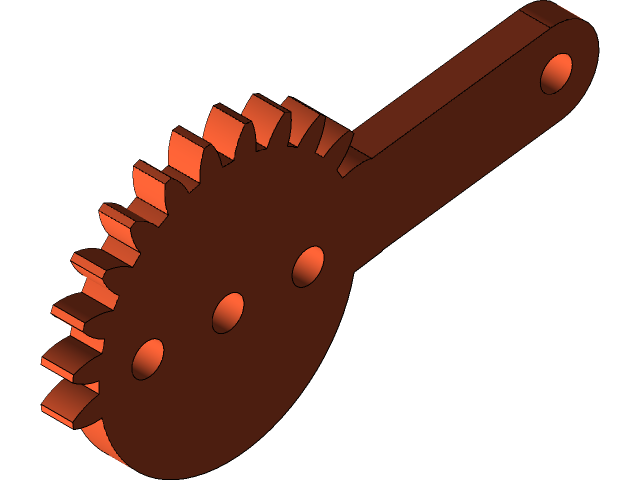

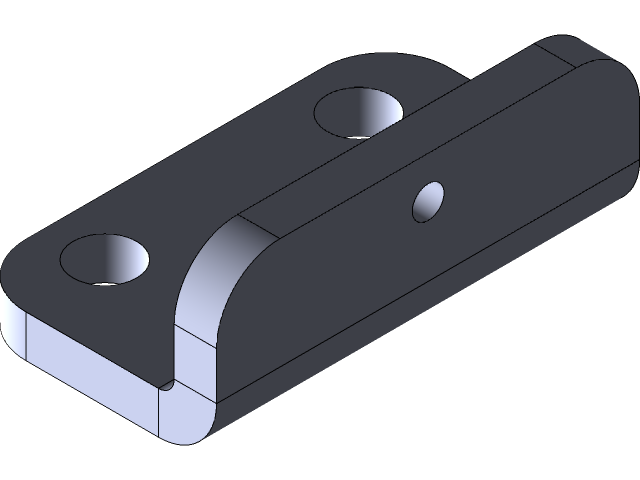
机械手和末端执行器
文件列表(压缩包大小 4.66M)
免费
概述
在机器人技术中,末端执行器是位于机器人手臂末端的设备,旨在与环境互动。该设备的确切性质取决于机器人的应用。
在严格的定义中,末端执行器是指机器人的最后一个链接(或末端),该定义源自串行机器人操纵器。在此端点上连接了工具。从广义上讲,可以将末端执行器视为与工作环境交互的机器人的一部分。这并不涉及也不是末端执行器的移动机器人的轮子或类人机器人的脚,它们是机器人移动性的一部分。
末端执行器可以由抓爪或工具组成。当提到机器人的抓握时,机器人抓爪分为四大类,分别是:
撞击式-颚或爪通过直接撞击物体而物理抓握。
侵入性–物理穿透对象表面的针,针或needle(用于纺织品,碳纤维和玻璃纤维的处理)。
施加在物体表面上的有限力-吸力[模糊](无论是通过真空,磁粘附还是电粘附)。
连续性–需要直接接触才能发生粘合(例如胶水,表面张力或冻结)。 它们基于不同的物理效果,用于确保抓取器和要抓取的对象之间的稳定抓握。[2]工业抓手可以是机械的,在行业中使用最为广泛,但也可以基于吸力或磁力。真空杯和电磁体在汽车领域尤其是金属板处理领域占据着主导地位。伯努利夹持器利用了夹持器与产生提升力的零件之间的气流,该提升力使夹持器和零件彼此靠近(即伯努利原理)。伯努利式抓具是一种非接触式抓具,即,对象保持在由抓具产生的力场中,而没有与其直接接触。伯努利抓爪已被用于光伏电池处理,硅片处理以及纺织和皮革行业。在宏观尺度(零件尺寸> 5mm)上,其他原理很少使用,但是在最近十年中,它们证明了在微处理中的有趣应用。他们中的一些人已经准备好扩展自己的原始领域。其他采用的原理是:基于静电的静电夹具和范德华夹具(即范德华力),基于液体介质的毛细管夹具和低温夹具,以及超声波夹具和激光夹具这两种非接触式抓握原理。静电抓取器基于抓取器与经常由抓取器本身激活的零件之间的电荷差(即静电力),而范德华抓取器基于低力(仍为静电),这归因于吸取器分子之间的原子吸引。抓取器和对象的抓取器。毛细管夹具利用夹具和零件之间的液体弯月面的表面张力来居中,对齐和抓紧零件,低温夹具冻结少量液体,产生的冰保证了提起和搬运物体所需的力(此原理也用于食品处理和纺织品抓取中)。基于超声波的夹具更加复杂,其中使用超声波驻波将零件提起并将其捕获到一定水平(悬浮的例子既是微观的,在螺钉和垫圈的处理中,又是宏观的,例如:太阳能电池或硅晶片处理),以及产生压力的激光源,该压力能够俘获并移动液体介质(主要是电池)中的微零件。激光夹具也被称为激光镊子。
摩擦/颚爪的一种特殊类型是针式爪:它们被称为侵入性爪,并利用摩擦和闭合形式作为标准机械爪。
最著名的机械抓手可以是两个,三个或什至五个手指。
可用作工具的末端执行器有多种用途,例如组件中的点焊,需要均匀涂装的喷涂,以及对人身危险的其他用途。手术机器人具有专门为此目的制造的末端执行器。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250






