资源下载
资源下载






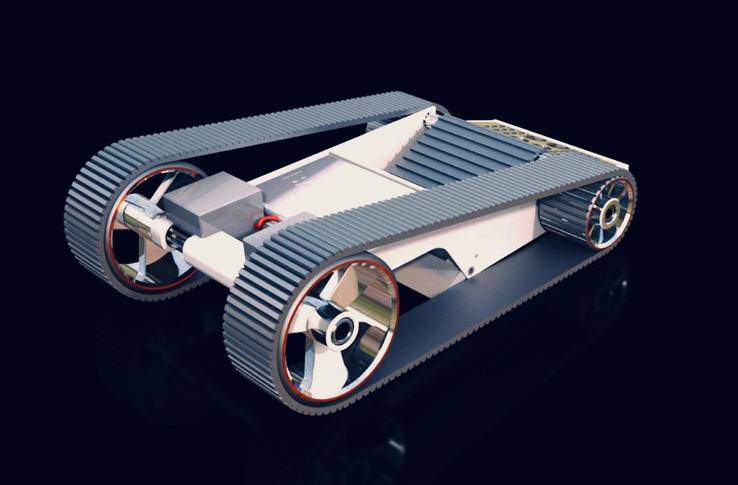
履带式无人救援机器人

文件列表(压缩包大小 73.87M)
免费
概述
该救援机器人的移动平台经过专门设计,可在矿井内部进行操作。
履带可变形,便于在狭窄空间内作业并越过大型障碍物。履带本身由涂有耐磨橡胶的金属链制成。
因此,该机器人可以轻松地穿越在矿山中常见的沙子和砾石。机器人的动力由6个相同的有刷直流电动机提供,最大爬坡角度60度,平路上最大速度1.6m/s。
该文件为solidworks格式,包含详细的零件图与部件图。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(2)

0/250
下载后的评价
感恩分享!
2022-12-08
回复
下载后的评价
赞
2023-02-14
回复