资源下载
资源下载




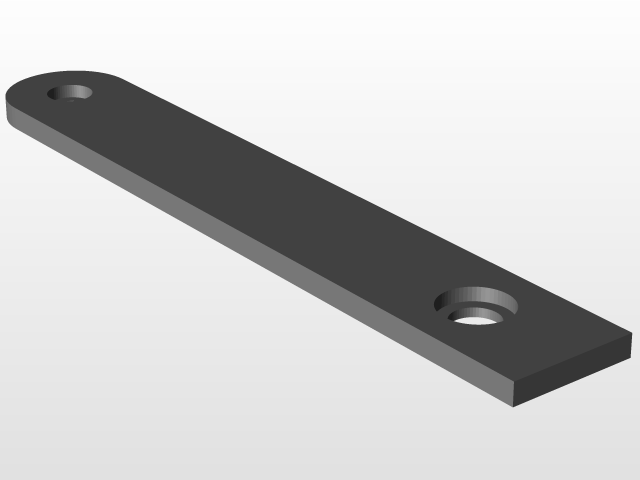
下臂假体
文件列表(压缩包大小 14.13M)
免费
概述
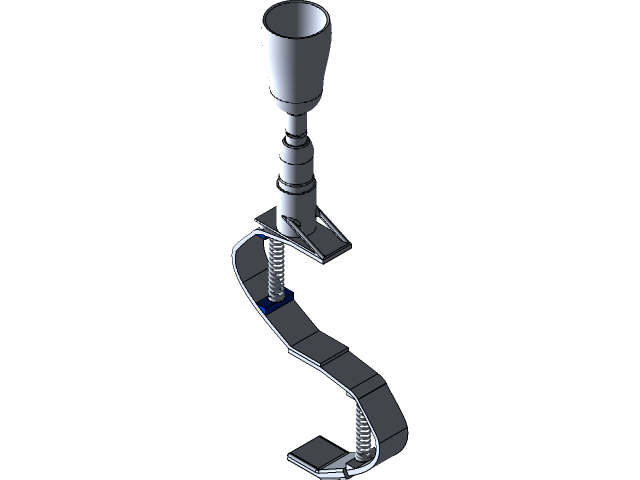
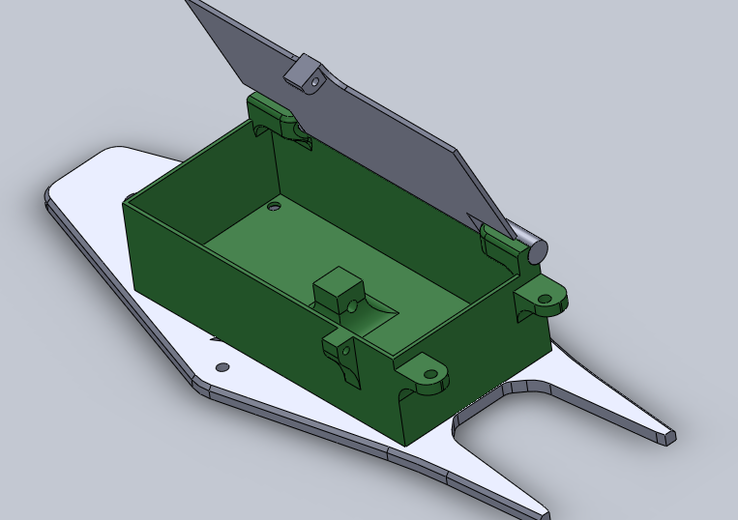
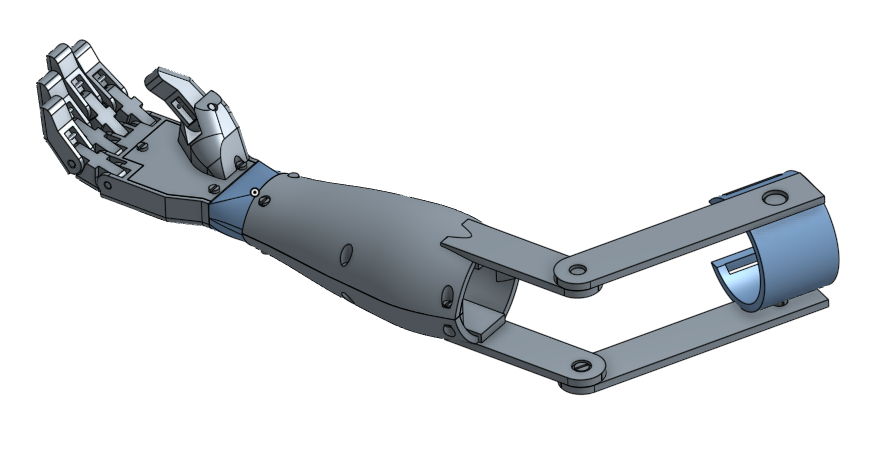
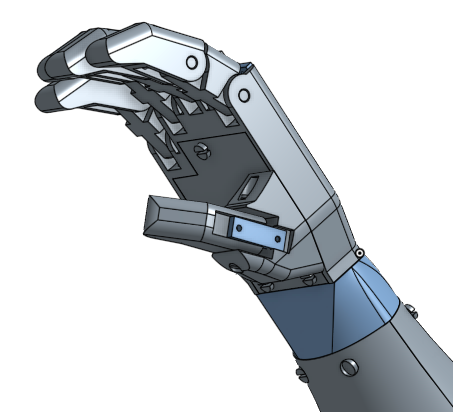
设计这种下臂假体的目的是使低成本的假体可用于更广泛的人群。通常,假肢可能非常昂贵,从而使有需要的人无法接触到假肢。 3D打印零件的低成本为可访问的医疗设备提供了无限的机会,这种经过重新设计的下臂假体旨在利用这一优势。话虽这么说,但要注意的是,该设备目前仅是原型,尚未经过全面测试。目前,这种设计是一种有趣的概念证明,但并不打算以其当前形式用作假体。 该手臂假体由许多不同的部分组成,旨在使用FDM打印机分别进行打印。大多数零件都打算使用ABS塑料进行印刷,并使用水溶性支持物以确保精确印刷。此设计中的引脚应印有100%填充以增加其强度,但其他部分不需要此填充量。其他一些零件也打算用柔性聚氨酯长丝(例如NINJAFLEX)进行印刷。这些柔性部件在提供的其他照片中以蓝色突出显示,包括手指关节,柔性腕部和上臂带。由于聚氨酯长丝的肖氏硬度只有约85A,因此允许印刷的部件自由弯曲。这允许舒适的上臂带以及可移动的手腕和手指。如果无法使用这种灯丝,则这些零件也可以使用ABS进行印刷,这只会妨碍接头的柔韧性。 为了演示此设计的3D可打印性,将全臂组件的STL上传到切片软件,并拍摄了屏幕截图。全臂组件只是作为示例演示可印刷性,这些部件实际上并不是要以这种方式进行打印,它们是要如上所述单独进行打印的。有些零件在设计中是重复的,因此需要打印多次。此外,出于本次提交的目的,前臂,腕部,臂带和连接器的零件可以排除在外,以便单独印刷零件时设计达到尺寸要求。 该手臂旨在用作主动修复体,这意味着电动机可以根据来自用户手臂的测得的EMG信号来打开和关闭手。为此所需的电子组件应包含在空心前臂和手掌中。钓鱼线应穿过每个指尖前侧的开口,并连接到前臂中的线性致动器。当电机将鱼线拉紧时,手指关节弯曲,手合上。要张开手,要慢慢松开鱼线,并且手指后部的柔性接头不弯曲,以便再次被动张开手。这些接头应拧入每个手指接头中,以将其固定到位。上一个原型机臂的补充视频已上传,以提供此想法的演示。 为了固定假肢,可以使用维可牢尼龙搭扣(Velcro)来紧紧上臂周围的臂带。将在空心前臂内部放置填充物,该填充物被模制成设备的特定用户所需的形状。可以在3D打印之前将零件缩放到合适的尺寸以适合目标用户,或者缩小到较小的尺寸以创建手的比例模型。
该设计是由滑铁卢大学的生物机电一体化俱乐部设计的。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250